The purpose of the program is to provide an energy optimization tool for industrial robotic cells.
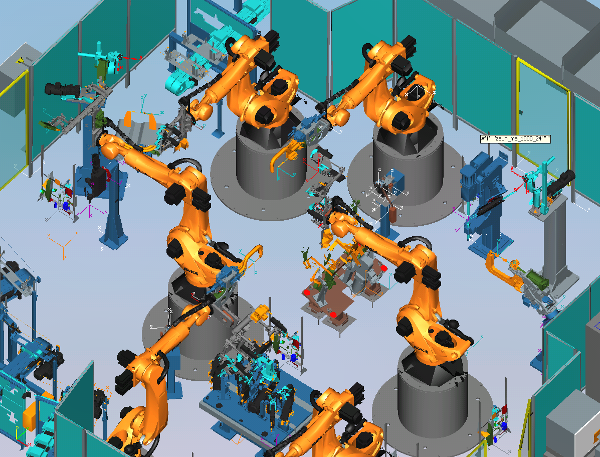
The energy optimization of industrial robotic cells, which is essential for sustainable development in the long-term, is addressed by developing novel algorithms that consider many aspects such as robot speeds, path selection, order of operations, and power saving modes of robots from the global point of view. The implemented exact algorithm employs an Integer Linear Programming solver, thus optimality of a solution can be proved, and is suitable rather for smaller instances. The heuristic algorithm, however, can beat the exact algorithm on real-sized problems thanks to the utilization of a parallel hardware and an optional Gurobi simplex method for convex functions. All the algorithms, data structures, and other related files are described in this documentation.
- Copyright
- This project is released under the GNU Public License.
- See also
- L. Bukata, P. Sucha, Z. Hanzalek, and P. Burget, Energy Optimization of Robotic Cells, in IEEE Transactions on Industrial Informatics, vol. 13, no. 1, pp. 92-102, Feb. 2017, doi: 10.1109/TII.2016.2626472.
