The structure with desired properties for the generated instances. More...
#include <ProjectParameters.h>
 Collaboration diagram for ProjectParameters:
Collaboration diagram for ProjectParameters: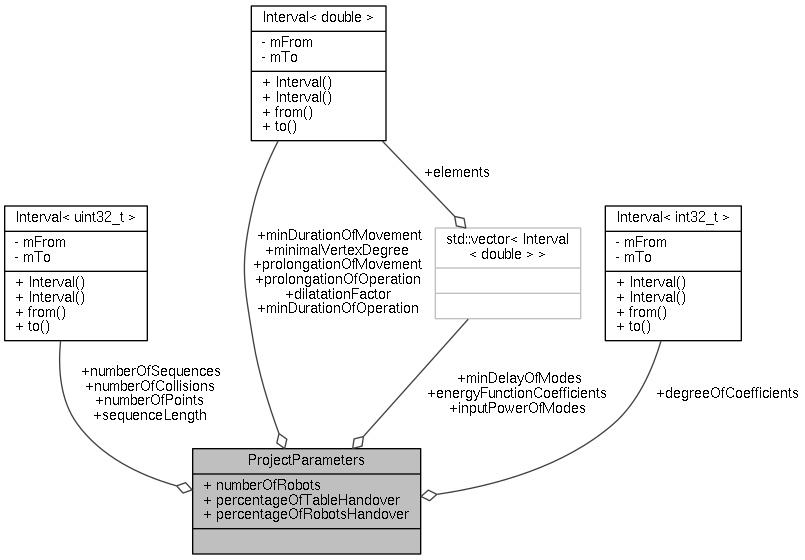
Public Attributes | |
| uint32_t | numberOfRobots |
| The number of robots in the robotic cell. | |
| std::vector< Interval< double > > | inputPowerOfModes |
| For each power saving mode of the robot the interval of input power is defined. | |
| std::vector< Interval< double > > | minDelayOfModes |
| The time interval of minimal duration for each power saving mode. | |
| Interval< double > | minDurationOfMovement |
| The interval of minimal duration of robot movements (defines the fastest movement). | |
| Interval< double > | prolongationOfMovement |
| The interval of prolongation for the fastest robot movements. | |
| std::vector< Interval< double > > | energyFunctionCoefficients |
| Intervals of energy function coefficients. | |
| Interval< int32_t > | degreeOfCoefficients |
The degree of coefficients, e.g. ![$[-1,1]$](form_0.png) results to results to  where where  are energy function coefficients. are energy function coefficients. | |
| Interval< double > | minDurationOfOperation |
| The interval of minimal duration of the robot operation, e.g. welding, assembling, ... | |
| Interval< double > | prolongationOfOperation |
| The time interval of the additive part to the minimal operation duration. | |
| Interval< uint32_t > | numberOfPoints |
| The interval of the number of points (i.e. robot configurations) for each robot operation. | |
| Interval< uint32_t > | numberOfSequences |
| The interval of the number of atomic sequences in each (dis)assembling/welding/cutting operation. | |
| Interval< uint32_t > | sequenceLength |
| The interval of the number of robot sub-operations for each atomic sequence. | |
| Interval< double > | minimalVertexDegree |
| The interval of the desired average node degree for the graph of robot interconnections. | |
| double | percentageOfTableHandover |
| The probability that the workpiece/weldment is handed over to other robot by using a bench. | |
| double | percentageOfRobotsHandover |
| The probability of the direct gripper-to-gripper handover. | |
| Interval< uint32_t > | numberOfCollisions |
| The interval of the number of generated collisions between robots. | |
| Interval< double > | dilatationFactor |
| Multiplicative factor by which the lower estimation of the cycle time will be adjusted. | |
Detailed Description
The structure with desired properties for the generated instances.
Definition at line 36 of file ProjectParameters.h.
The documentation for this struct was generated from the following file:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/ProjectParameters.h
