Default configuration of the solver. More...
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: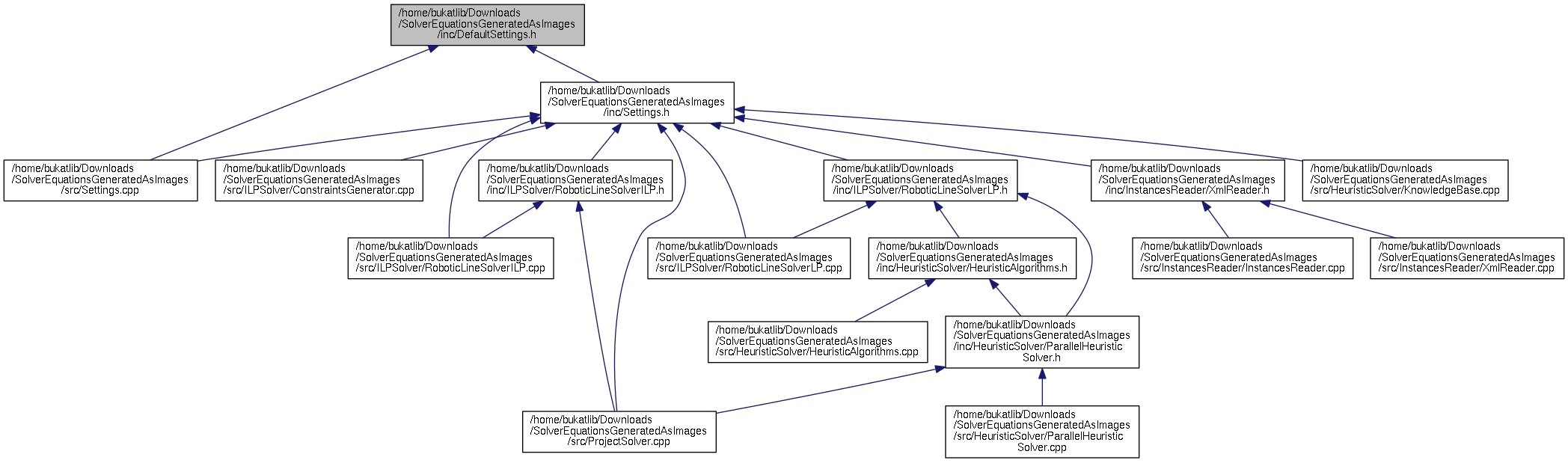
Go to the source code of this file.
Macros | |
| #define | DEFAULT_DATASET_FILE "" |
| Dataset to be loaded if not specified. | |
| #define | DEFAULT_VERBOSE false |
| Verbosity is not turn on by default. | |
| #define | DEFAULT_NUMBER_OF_SEGMENTS 10 |
| The number of linear functions that approximate each energy function of the movement. | |
| #define | DEFAULT_MAX_RUNTIME 30.0 |
| Default time limit. | |
| #define | DEFAULT_USE_HEURISTICS true |
| It specifies whether the heuristic algorithm should be preferred by default. | |
| #define | DEFAULT_USE_EXACT_ALGORITHM false |
| It specifies whether the exact algorithm should be preferred by default. | |
| #define | DEFAULT_RESULTS_DIRECTORY "" |
| Path to a directory where the results could be written. | |
| #define | DEFAULT_ILP_RELATIVE_GAP 0.0 |
| ILP solver stops if a current best solution is not worse than gap*100 % from optimality. | |
| #define | DEFAULT_CALCULATE_LOWER_BOUND false |
| It specifies whether a tight lower bound should be calculated. | |
| #define | DEFAULT_RUNTIME_OF_LOWER_BOUND 15.0 |
| Upper bound on time limit for the tight lower bound. | |
| #define | DEFAULT_MAX_ELITE_SOLUTIONS 20 |
| Default number of elite solutions stored by the heuristic. | |
| #define | DEFAULT_MAX_ALTERNATIVES 1000 |
| It bounds the maximal number of generated alternatives for each robot, only some of them are selected. | |
| #define | DEFAULT_MIN_ITERS_PER_TUPLE 100 |
| The minimal number of optimization iterations per partial solution in the heuristic. | |
Detailed Description
Default configuration of the solver.
Definition in file DefaultSettings.h.
