The base class incorporating common properties for robot operations and movements. More...
#include <RoboticLine.h>
 Inheritance diagram for Activity:
Inheritance diagram for Activity: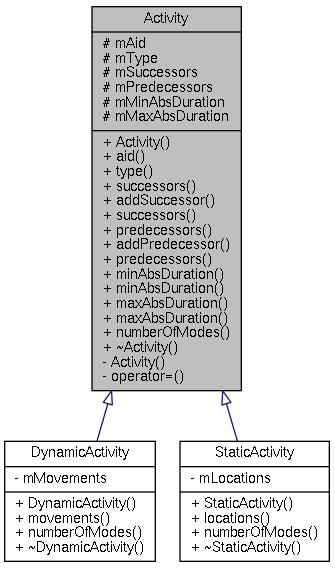 Collaboration diagram for Activity:
Collaboration diagram for Activity: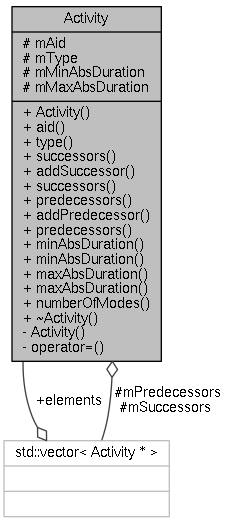
Public Member Functions | |
| Activity (const uint32_t &aid, const ActivityType &type) | |
| The base constructor called from the derived classes for initialization of attributes. More... | |
| uint32_t | aid () const |
| ActivityType | type () const |
| void | successors (const std::vector< Activity * > &successors) |
| void | addSuccessor (Activity *successor) |
| std::vector< Activity * > | successors () const |
| void | predecessors (const std::vector< Activity * > &predecessors) |
| void | addPredecessor (Activity *predecessor) |
| std::vector< Activity * > | predecessors () const |
| void | minAbsDuration (const double &minAbsDuration) |
| double | minAbsDuration () const |
| void | maxAbsDuration (const double &maxAbsDuration) |
| double | maxAbsDuration () const |
| virtual size_t | numberOfModes () const =0 |
Protected Attributes | |
| uint32_t | mAid |
| Identification of the activity. | |
| ActivityType | mType |
| The type of the activity, see ActivityType enum. | |
| std::vector< Activity * > | mSuccessors |
| The successors of the activity. | |
| std::vector< Activity * > | mPredecessors |
| The predecessors of the activity. | |
| double | mMinAbsDuration |
| The minimal absolute duration of the activity to remain feasible. | |
| double | mMaxAbsDuration |
| The maximal absolute duration of the activity to remain feasible. | |
Private Member Functions | |
| Activity (const Activity &)=delete | |
| Activity & | operator= (const Activity &)=delete |
Detailed Description
The base class incorporating common properties for robot operations and movements.
The abstract class incorporating the common properties of both types of the activity, i.e. operations and movements. Even though the robot operations, e.g assembling and welding, are considered as stationary, which is not true in nature, it is no problem to decompose these operations further into more sub-operations and sub-movements to achieve higher model accuracy.
Definition at line 193 of file RoboticLine.h.
Constructor & Destructor Documentation
|
inline |
The base constructor called from the derived classes for initialization of attributes.
- Parameters
-
aid Identification of the activity. type The type of activity, see ActivityType enum.
Definition at line 200 of file RoboticLine.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
