The file contains various classes devoted to abstract representation of the robotic cell. More...
#include <iostream>#include <stdint.h>#include <sstream>#include <string>#include <vector>#include <utility>#include "ProjectParameters.h" Include dependency graph for RoboticLine.h:
Include dependency graph for RoboticLine.h: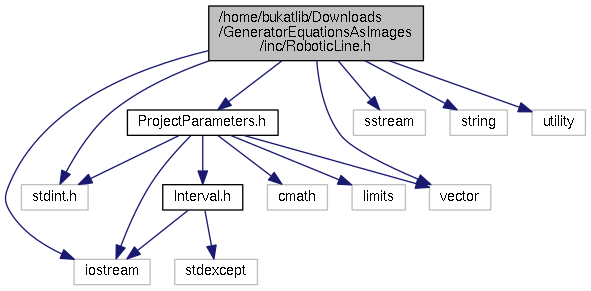 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: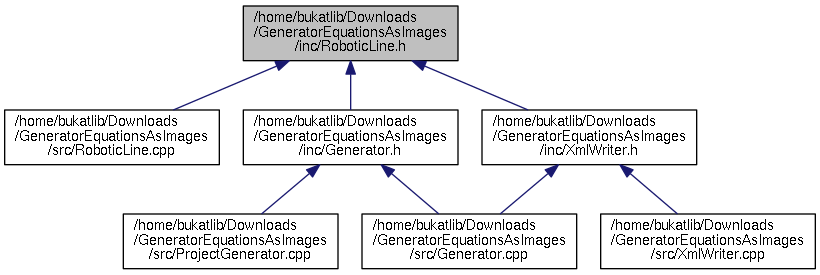
Go to the source code of this file.
Classes | |
| struct | Monomial |
It represents the part of energy functions, i.e.  where where  is the duration of the movement. More... is the duration of the movement. More... | |
| class | Movement |
| The class represents the robot movement between two coordinates. More... | |
| class | RobotPowerMode |
| It represents the power saving mode of the robot. More... | |
| class | LocationDependentPowerConsumption |
| The class specifies input power of the robot for a particular robot configuration. More... | |
| class | Location |
| It represents the location of robotic work. More... | |
| class | Activity |
| The base class incorporating common properties for robot operations and movements. More... | |
| class | StaticActivity |
| Collection of locations in which a robot operation can be performed. More... | |
| class | DynamicActivity |
| Collection of movements between two static activities. More... | |
| class | Robot |
| Instance of the class includes all the data structures and methods related to a robot. More... | |
| struct | Robot::mCompositeBlock |
| The structure containing the activities in a block. More... | |
| class | TimeLag |
| Instance of TimeLag class defines a time relation between two different robots. More... | |
| class | Pair |
| Auxiliary class encapsulating two activities to form collision or spatial compatibility pair. More... | |
| struct | std::hash< Pair > |
| A specialisation of std::hash template class for Pair data-structure. More... | |
| class | InterRobotOperation |
| The inter-robot operation corresponding to the workpiece/weldment handling. More... | |
| class | RoboticLine |
| The robotic cell corresponds to an instance of this class. More... | |
Enumerations | |
| enum | ActivityType { IN, OUT, INNER, WAIT, MOVEMENT } |
Functions | |
| template<class T > | |
| std::string | numberToString (const T &number) |
| It converts the number to string. More... | |
Detailed Description
The file contains various classes devoted to abstract representation of the robotic cell.
Definition in file RoboticLine.h.
Enumeration Type Documentation
| enum ActivityType |
The enum defines the constants for different types of activities. For robot operations (see StaticActivity class), it is classified with respect to the workpiece/weldment flow from the robot perspective, i.e. IN - input, OUT - output, INNER - some robotic work, WAIT - waiting for work (dummy operation). For robot movements (see DynamicActivity class), there is only one type, i.e. MOVEMENT.
Definition at line 49 of file RoboticLine.h.
Function Documentation
| std::string numberToString | ( | const T & | number | ) |
It converts the number to string.
- Parameters
-
number The value to be converted to string.
- Template Parameters
-
T Numeric type.
- Returns
- The value converted to string.
- Note
- As C++11 'to_string' function is not declared for Cygwin g++ compiler it is necessary to workaround the bug.
Definition at line 61 of file RoboticLine.h.
