The class represents the robot movement between two coordinates. More...
#include <RoboticLine.h>
 Collaboration diagram for Movement:
Collaboration diagram for Movement: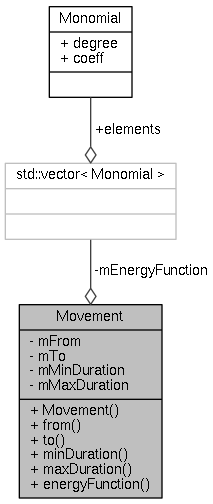
Public Member Functions | |
| Movement (const uint32_t &from, const uint32_t &to, const ProjectParameters &par) | |
| The constructor creates the movement according to the desired properties given in the project configuration file. More... | |
| uint32_t | from () const |
| uint32_t | to () const |
| double | minDuration () const |
| double | maxDuration () const |
| std::vector< Monomial > | energyFunction () const |
Private Attributes | |
| uint32_t | mFrom |
| Identification of the start coordinate of the movement. | |
| uint32_t | mTo |
| Identification of the end coordinate of the movement. | |
| double | mMinDuration |
| The minimal possible duration of the robot movement. | |
| double | mMaxDuration |
| The maximal duration of the movement. | |
| std::vector< Monomial > | mEnergyFunction |
Detailed Description
The class represents the robot movement between two coordinates.
Definition at line 70 of file RoboticLine.h.
Constructor & Destructor Documentation
| Movement::Movement | ( | const uint32_t & | from, |
| const uint32_t & | to, | ||
| const ProjectParameters & | par | ||
| ) |
The constructor creates the movement according to the desired properties given in the project configuration file.
- Parameters
-
from Identification of the start coordinate, see Location::mPoint. to Identification of the end coordinate, see Location::mPoint. par It contains the parameters for the movement generation.
Definition at line 34 of file RoboticLine.cpp.
Member Data Documentation
|
private |
Energy function, the relation between the duration and required energy for the movement, is modelled as a sum of monomials stored in mEnergyFunction vector.
Definition at line 98 of file RoboticLine.h.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/src/RoboticLine.cpp
