It represents the location of robotic work. More...
#include <RoboticLine.h>
 Collaboration diagram for Location:
Collaboration diagram for Location: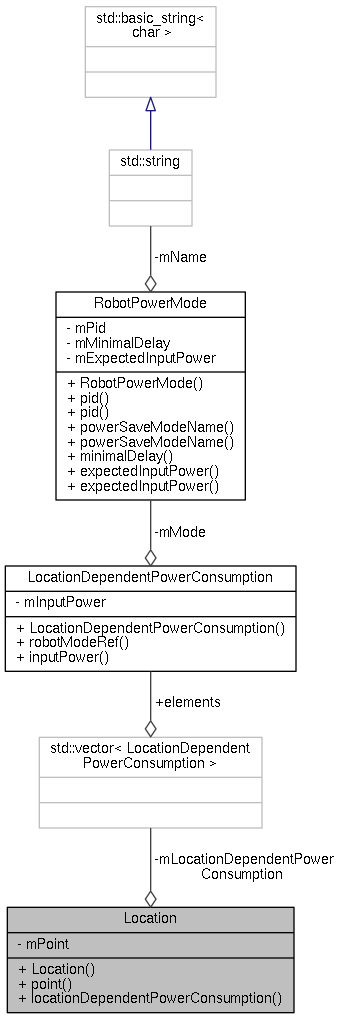
Public Member Functions | |
| Location (const uint32_t &point, const std::vector< RobotPowerMode * > &robotModes, const ProjectParameters &par) | |
| It constructs the object representing a location of an operation from the robot point of view. More... | |
| uint32_t | point () const |
| std::vector< LocationDependentPowerConsumption > | locationDependentPowerConsumption () const |
Private Attributes | |
| uint32_t | mPoint |
| Identification of the robot configuration for the given location and operation. | |
| std::vector< LocationDependentPowerConsumption > | mLocationDependentPowerConsumption |
| It defines the power consumption for the robot power saving modes that input power is dependent on the robot configuration. | |
Detailed Description
It represents the location of robotic work.
The instance of the class corresponds to a robot configuration, in which the robot can perform an operation on the workpiece/weldment. Even though the class is called Location, it represents not only the absolute coordinates of the operation but also orientation of the gun/gripper of the robot.
Definition at line 166 of file RoboticLine.h.
Constructor & Destructor Documentation
| Location::Location | ( | const uint32_t & | point, |
| const std::vector< RobotPowerMode * > & | robotModes, | ||
| const ProjectParameters & | par | ||
| ) |
It constructs the object representing a location of an operation from the robot point of view.
- Parameters
-
point Identification of the robot configuration for a given location and orientation. robotModes Power saving modes of the robot from which the location is reachable. par It comprises of the desired parameters for the generation of robotic cells.
Definition at line 51 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/src/RoboticLine.cpp
