Collection of movements between two static activities. More...
#include <RoboticLine.h>
 Inheritance diagram for DynamicActivity:
Inheritance diagram for DynamicActivity: Collaboration diagram for DynamicActivity:
Collaboration diagram for DynamicActivity: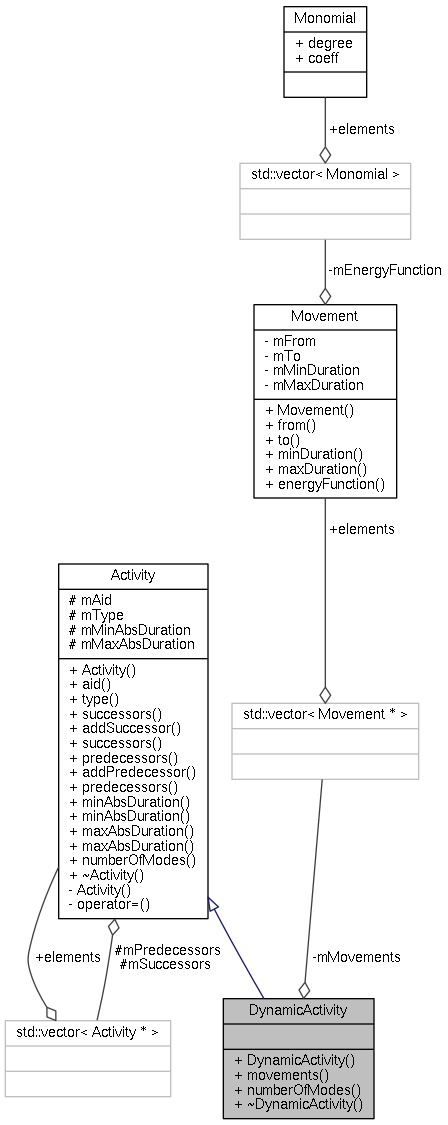
Public Member Functions | |
| DynamicActivity (const uint32_t &aid, StaticActivity *fromActivity, StaticActivity *toActivity, const ProjectParameters &par) | |
| It generates the dynamic activity with respect to the desired properties. More... | |
| std::vector< Movement * > | movements () const |
| virtual size_t | numberOfModes () const override |
| virtual | ~DynamicActivity () override |
| It frees the memory occupied by dynamically allocated movements. | |
| Public Member Functions inherited from Activity | |
| Activity (const uint32_t &aid, const ActivityType &type) | |
| The base constructor called from the derived classes for initialization of attributes. More... | |
| uint32_t | aid () const |
| ActivityType | type () const |
| void | successors (const std::vector< Activity * > &successors) |
| void | addSuccessor (Activity *successor) |
| std::vector< Activity * > | successors () const |
| void | predecessors (const std::vector< Activity * > &predecessors) |
| void | addPredecessor (Activity *predecessor) |
| std::vector< Activity * > | predecessors () const |
| void | minAbsDuration (const double &minAbsDuration) |
| double | minAbsDuration () const |
| void | maxAbsDuration (const double &maxAbsDuration) |
| double | maxAbsDuration () const |
Private Attributes | |
| std::vector< Movement * > | mMovements |
| The collection of movements between two static activities. | |
Additional Inherited Members | |
| Protected Attributes inherited from Activity | |
| uint32_t | mAid |
| Identification of the activity. | |
| ActivityType | mType |
| The type of the activity, see ActivityType enum. | |
| std::vector< Activity * > | mSuccessors |
| The successors of the activity. | |
| std::vector< Activity * > | mPredecessors |
| The predecessors of the activity. | |
| double | mMinAbsDuration |
| The minimal absolute duration of the activity to remain feasible. | |
| double | mMaxAbsDuration |
| The maximal absolute duration of the activity to remain feasible. | |
Detailed Description
Collection of movements between two static activities.
The dynamic activity represents a collection of possible movements between two static activities. In the final solution, at most one movement can be selected for each dynamic activity due to the alternatives, i.e. the possibility to select from multiple process plans - activity orders.
Definition at line 270 of file RoboticLine.h.
Constructor & Destructor Documentation
| DynamicActivity::DynamicActivity | ( | const uint32_t & | aid, |
| StaticActivity * | fromActivity, | ||
| StaticActivity * | toActivity, | ||
| const ProjectParameters & | par | ||
| ) |
It generates the dynamic activity with respect to the desired properties.
- Parameters
-
aid Unique identification of the activity. fromActivity The static activity from which the movements are leaving. toActivity The static activity to which the movements are entering. par The parameters used for the generation.
Definition at line 90 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/src/RoboticLine.cpp
