The robotic cell corresponds to an instance of this class. More...
#include <RoboticLine.h>
 Collaboration diagram for RoboticLine:
Collaboration diagram for RoboticLine: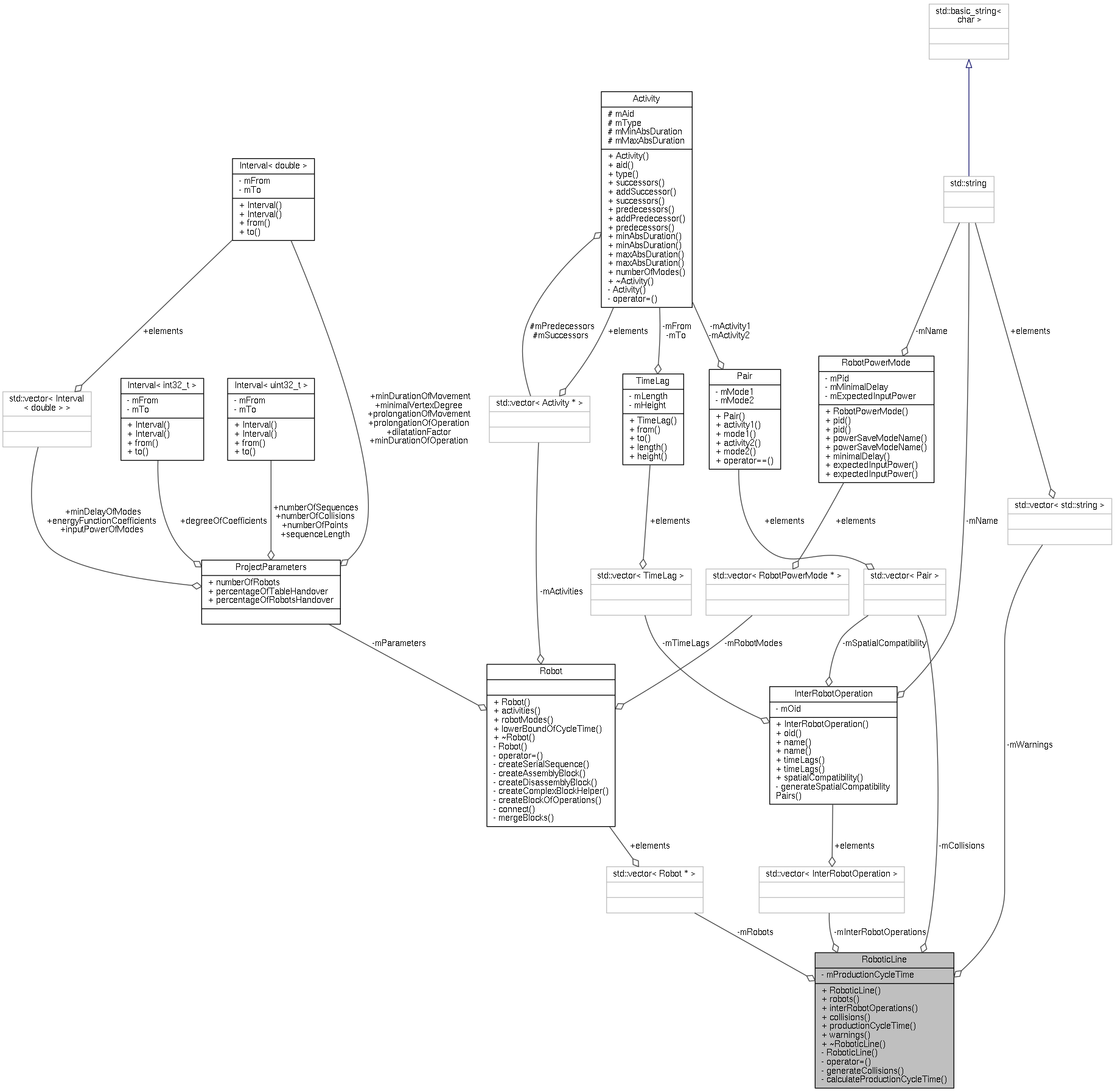
Public Member Functions | |
| RoboticLine (const ProjectParameters &par) | |
| It generates all the required data-structures for the robotic cell, i.e. an instance of a robotic cell. More... | |
| std::vector< Robot * > | robots () const |
| std::vector< InterRobotOperation > | interRobotOperations () const |
| std::vector< Pair > | collisions () const |
| double | productionCycleTime () const |
| std::vector< std::string > | warnings () const |
| ~RoboticLine () | |
| It frees all the memory occupied by robots. | |
Private Member Functions | |
| RoboticLine (const RoboticLine &)=delete | |
| RoboticLine & | operator= (const RoboticLine &)=delete |
| void | generateCollisions (const ProjectParameters &par) |
| It generates collisions between robots. More... | |
| void | calculateProductionCycleTime (const ProjectParameters &par) |
| It calculates production cycle time with respect to the desired dilatation factor. More... | |
Private Attributes | |
| std::vector< Robot * > | mRobots |
| Robots incorporated in the robotic cell. | |
| std::vector< InterRobotOperation > | mInterRobotOperations |
| Inter-robot operations for a weldment/workpiece passing. | |
| std::vector< Pair > | mCollisions |
| Collisions between robots. | |
| double | mProductionCycleTime |
| The calculated production cycle time for *this robotic cell. | |
| std::vector< std::string > | mWarnings |
| Warnings produced during the generation of this robotic cell. Written to the console later to not mix with the progress bar output. | |
Detailed Description
The robotic cell corresponds to an instance of this class.
The instance of this class corresponds to the whole robotic cell including its robots, operations, and synchronisations. Moreover, it holds the calculated production cycle time with respect to the generated data.
Definition at line 553 of file RoboticLine.h.
Constructor & Destructor Documentation
| RoboticLine::RoboticLine | ( | const ProjectParameters & | par | ) |
It generates all the required data-structures for the robotic cell, i.e. an instance of a robotic cell.
- Parameters
-
par Desired parameters of the robotic cell to be generated.
Definition at line 398 of file RoboticLine.cpp.
Member Function Documentation
|
private |
It calculates production cycle time with respect to the desired dilatation factor.
- Parameters
-
par Used to get a factor by which the lower estimation of the production cycle time is multiplied.
Definition at line 568 of file RoboticLine.cpp.
|
private |
It generates collisions between robots.
- Parameters
-
par Desired properties of the generated collisions.
Definition at line 525 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/src/RoboticLine.cpp
