The inter-robot operation corresponding to the workpiece/weldment handling. More...
#include <RoboticLine.h>
 Collaboration diagram for InterRobotOperation:
Collaboration diagram for InterRobotOperation: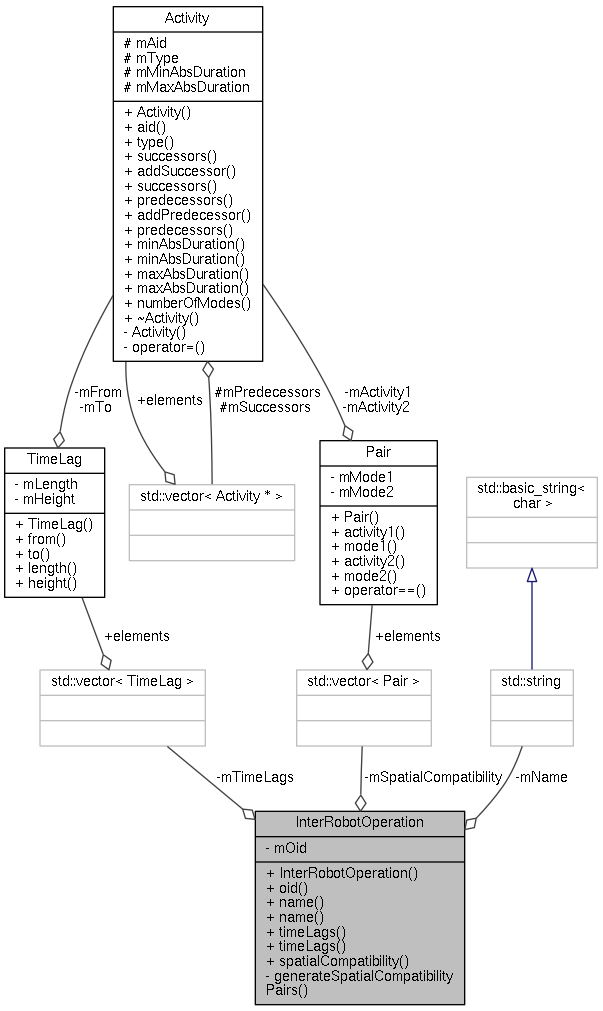
Public Member Functions | |
| InterRobotOperation (uint32_t oid, Activity *out, Activity *in, const ProjectParameters &par) | |
| It creates the inter-robot operation according the desired parameters stated in ProjectParameters data-structure. More... | |
| uint32_t | oid () const |
| std::string | name () const |
| void | name (const std::string &name) |
| std::vector< TimeLag > | timeLags () const |
| void | timeLags (const std::vector< TimeLag > &timeLags) |
| std::vector< Pair > | spatialCompatibility () const |
Private Member Functions | |
| void | generateSpatialCompatibilityPairs (Activity *a1, Activity *a2) |
| It is an auxiliary method for the constructor that helps to generate the compatibility pairs. More... | |
Private Attributes | |
| uint32_t | mOid |
| Integer identification of the inter-robot operation. | |
| std::string | mName |
| The name of the inter-robot operation. | |
| std::vector< TimeLag > | mTimeLags |
| Time lags ensuring the correct time synchronization between robots. | |
| std::vector< Pair > | mSpatialCompatibility |
| Spatial compatibility pairs, i.e. a handover takes place at the right location for both involved robots. | |
Detailed Description
The inter-robot operation corresponding to the workpiece/weldment handling.
The class corresponds to the inter-robot operation, e.g. a workpiece/weldment passing. It incorporates time lags and spatial compatibility pairs that are necessary for the correct synchronisation between robots.
- Note
- Thanks to the time lags and compatibility pairs it is possible to model even more complex operations than there are currently modelled.
Definition at line 512 of file RoboticLine.h.
Constructor & Destructor Documentation
| InterRobotOperation::InterRobotOperation | ( | uint32_t | oid, |
| Activity * | out, | ||
| Activity * | in, | ||
| const ProjectParameters & | par | ||
| ) |
It creates the inter-robot operation according the desired parameters stated in ProjectParameters data-structure.
- Parameters
-
oid Integer identification of the operation. out The activity corresponds to the putting a weldment/workpiece on the bench or handing it over to another robot. in The activity corresponds to the getting a workpiece/weldment from the bench or another robot. par Parameters used for the generation of the inter-robot operation.
Definition at line 339 of file RoboticLine.cpp.
Member Function Documentation
|
private |
It is an auxiliary method for the constructor that helps to generate the compatibility pairs.
- Parameters
-
a1,a2 Two activities between which the spatial compatibility must be met.
Definition at line 368 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/src/RoboticLine.cpp
