Instance of TimeLag class defines a time relation between two different robots. More...
#include <RoboticLine.h>
 Collaboration diagram for TimeLag:
Collaboration diagram for TimeLag: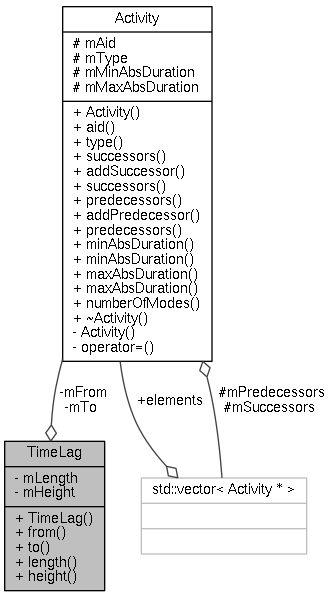
Public Member Functions | |
| TimeLag (Activity *from, Activity *to, const double &length, const int32_t &height) | |
| It initializes the time lag between two activities. More... | |
| Activity * | from () const |
| Activity * | to () const |
| double | length () const |
| int32_t | height () const |
Private Attributes | |
| Activity * | mFrom |
| The activity from which the arc is leaving. | |
| Activity * | mTo |
| The activity to which the arc is entering. | |
| double | mLength |
| The time offset of the inter-robot arc. | |
| int32_t | mHeight |
| The time offset in the number of cycles. | |
Detailed Description
Instance of TimeLag class defines a time relation between two different robots.
The synchronization of robots is accomplished by using time lags. Multiple instances of this class can model e.g. a workpiece/weldment passing, which can be carried out either directly, i.e. gripper-to-gripper, or by using the bench.
Definition at line 423 of file RoboticLine.h.
Constructor & Destructor Documentation
|
inline |
It initializes the time lag between two activities.
- Parameters
-
from,to A directed arc 'from -> to'. length The time offset on the arc which is shorter than cycle time. height It determines the offset in the number of cycles.
Definition at line 431 of file RoboticLine.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
