Instance of the class includes all the data structures and methods related to a robot. More...
#include <RoboticLine.h>
 Collaboration diagram for Robot:
Collaboration diagram for Robot: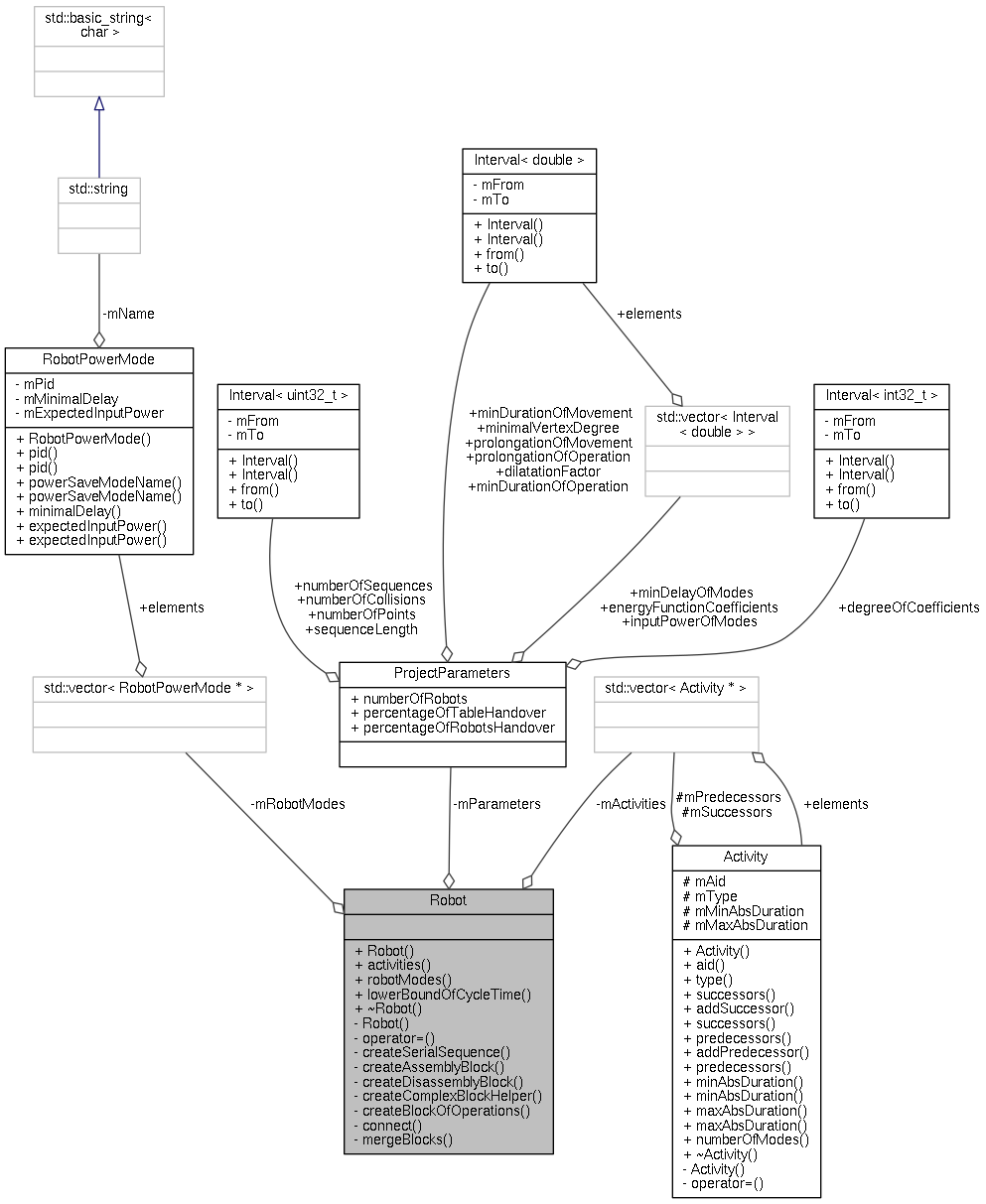
Classes | |
| struct | mCompositeBlock |
| The structure containing the activities in a block. More... | |
Public Member Functions | |
| Robot (uint32_t &fromActivityId, uint32_t &fromPointId, const uint32_t &numberOfInputs, const uint32_t &numberOfOutputs, const ProjectParameters &par) | |
| It constructs the robot according to the desired parameters. More... | |
| std::vector< Activity * > | activities () const |
| std::vector< RobotPowerMode * > | robotModes () const |
| double | lowerBoundOfCycleTime () const |
| The method calculates an estimation of cycle time. More... | |
| ~Robot () | |
| It frees the memory occupied by dynamically allocated activities and power saving modes. | |
Private Member Functions | |
| Robot (const Robot &)=delete | |
| Robot & | operator= (const Robot &)=delete |
| mCompositeBlock | createSerialSequence (uint32_t &fromActivityId, uint32_t &fromPointId) const |
| The method creates a block of a fixed sequence of operations, e.g. welding, cutting, without alternatives and updates the identification values. More... | |
| mCompositeBlock | createAssemblyBlock (uint32_t &fromActivityId, uint32_t &fromPointId, const uint32_t &numberOfInputs) const |
| It creates a block composed of gathering required parts to a bench and their assembly/welding to one workpiece. More... | |
| mCompositeBlock | createDisassemblyBlock (uint32_t &fromActivityId, uint32_t &fromPointId, const uint32_t &numberOfOutputs) const |
| It creates a block composed of disassembling/cutting the workpiece and taking its parts to other robots or benches. More... | |
| mCompositeBlock | createComplexBlockHelper (uint32_t &fromActivityId, uint32_t &fromPointId, const uint32_t &numberOfSeq, const std::string &op) const |
| It is an auxiliary method wrapping complex calls to createBlockOfOperations method. More... | |
| mCompositeBlock | createBlockOfOperations (uint32_t &fromActivityId, uint32_t &fromPointId, const ActivityType &t1, const ActivityType &t2, const Interval< uint32_t > &numSeq, const Interval< uint32_t > &seqLength) const |
| It is a core method for the decomposition of the robot work to well-defined blocks. More... | |
| void | connect (uint32_t &fromActivityId, mCompositeBlock &b, const std::vector< StaticActivity * > &from, const std::vector< StaticActivity * > &to, bool fullyConnected=true) const |
| It interconnects two sub-blocks and adds the generated dynamic activities to the block b. More... | |
| mCompositeBlock | mergeBlocks (const std::vector< mCompositeBlock > &blocks) const |
| It copies the activities (their pointers) in blocks to the one composite block. More... | |
Private Attributes | |
| ProjectParameters | mParameters |
| Desired properties of generated instances defined in the input configuration file. | |
| std::vector< Activity * > | mActivities |
| A collection of activities belonging to the robot. | |
| std::vector< RobotPowerMode * > | mRobotModes |
| Available power saving modes for this robot. | |
Detailed Description
Instance of the class includes all the data structures and methods related to a robot.
The instance of this class corresponds to a robot with its operations and movements. The order of activities is incorporated in activities' successors and predecessors.
Definition at line 297 of file RoboticLine.h.
Constructor & Destructor Documentation
| Robot::Robot | ( | uint32_t & | fromActivityId, |
| uint32_t & | fromPointId, | ||
| const uint32_t & | numberOfInputs, | ||
| const uint32_t & | numberOfOutputs, | ||
| const ProjectParameters & | par | ||
| ) |
It constructs the robot according to the desired parameters.
- Parameters
-
fromActivityId An initial activity numbering, i.e. unique identification. fromPointId An initial unique identification of locations, i.e. robot configurations. numberOfInputs The number of input static activities for taking the workpiece/weldment from other robot or shared bench. numberOfOutputs The number of output static activities for passing the workpiece/weldment to other robot directly or using shared bench. par Parameters required for generation of the robot.
Definition at line 128 of file RoboticLine.cpp.
Member Function Documentation
|
private |
It interconnects two sub-blocks and adds the generated dynamic activities to the block b.
- Parameters
-
fromActivityId An initial unique identification of new activities that will be updated. b A block to which interconnecting dynamic activities ('from -> to') are added. from,to Static activities between which the interconnections will be established. fullyConnected It influences the number of interconnections (true ~ all-to-all, false ~ any-to-any).
Definition at line 309 of file RoboticLine.cpp.
|
private |
It creates a block composed of gathering required parts to a bench and their assembly/welding to one workpiece.
- Parameters
-
fromActivityId,fromPointId It is a reference to an initial activity/location identification respectively. numberOfInputs The number of input parts to be assembled or welded.
- Returns
- An assembling/welding block with alternatives.
- Note
- Do not be confused by the name of the method, it can be also used for a creation of a welding block.
- See also
- mCompositeBlock, createComplexBlockHelper
Definition at line 215 of file RoboticLine.cpp.
|
private |
It is a core method for the decomposition of the robot work to well-defined blocks.
- Parameters
-
fromActivityId,fromPointId It is a reference to an initial activity/location identification respectively. t1 The type of sub-block input activities, not necessarily IN. t2 The type of sub-block output activities, not necessarily OUT. numSeq Interval of the number of independent fixed sequences of some work, e.g. welding, cutting, etc. seqLength Interval of possible lengths of fixed sequences, i.e. e.g. atomic welding/cutting sub-tasks.
- Returns
- A sub-block with alternatives, i.e. order of fixed sequences can be arbitrarily selected, used in complex blocks.
- Warning
- It updates fromActivityId and fromPointId values.
- See also
- mCompositeBlock, ActivityType
Definition at line 247 of file RoboticLine.cpp.
|
private |
It is an auxiliary method wrapping complex calls to createBlockOfOperations method.
- Parameters
-
fromActivityId,fromPointId It is a reference to an initial activity/location identification respectively. numberOfSeq Number of input or output parts. op It determines the type of a block, i.e. "assembly" or "disassembly".
- Returns
- A complex block which type is specified by op parameter.
- Note
- It greatly simplifies the implementation of createAssemblyBlock and createDisassemblyBlock methods.
Definition at line 223 of file RoboticLine.cpp.
|
private |
It creates a block composed of disassembling/cutting the workpiece and taking its parts to other robots or benches.
- Parameters
-
fromActivityId,fromPointId It is a reference to an initial activity/location identification respectively. numberOfOutputs The number of parts to which the input workpiece is disassembled/cut.
- Returns
- An disassembling/cutting block with alternatives.
- Note
- Do not be confused by the name of the method, it can be also used for a creation of a cutting block.
- See also
- mCompositeBlock, createComplexBlockHelper
Definition at line 219 of file RoboticLine.cpp.
|
private |
The method creates a block of a fixed sequence of operations, e.g. welding, cutting, without alternatives and updates the identification values.
- Parameters
-
fromActivityId,fromPointId It is a reference to an initial activity/location identification respectively.
- Returns
- A block of a fixed sequence of operations.
- See also
- mCompositeBlock, createBlockOfOperations
Definition at line 206 of file RoboticLine.cpp.
| double Robot::lowerBoundOfCycleTime | ( | ) | const |
The method calculates an estimation of cycle time.
- Returns
- It returns the lower estimation of production cycle time for this robot.
Definition at line 179 of file RoboticLine.cpp.
|
private |
It copies the activities (their pointers) in blocks to the one composite block.
- Parameters
-
blocks The blocks to be merged to one.
- Returns
- The composite block created from blocks.
- See also
- mCompositeBlock
Definition at line 320 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/src/RoboticLine.cpp
