Either a movement or location. More...
#include <RoboticLine.h>
 Inheritance diagram for ActivityMode:
Inheritance diagram for ActivityMode: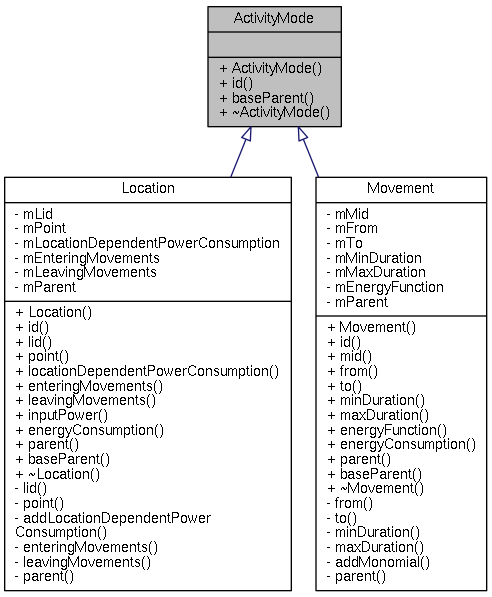 Collaboration diagram for ActivityMode:
Collaboration diagram for ActivityMode:
Public Member Functions | |
| virtual uint32_t | id () const =0 |
| virtual Activity * | baseParent () const =0 |
Detailed Description
Either a movement or location.
A base class (wrapper) for the robot movement or robot location. It is particularly useful for easier data representation of robot collisions.
Definition at line 54 of file RoboticLine.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
