It represents the power saving mode of the robot. More...
#include <RoboticLine.h>
 Collaboration diagram for RobotPowerMode:
Collaboration diagram for RobotPowerMode: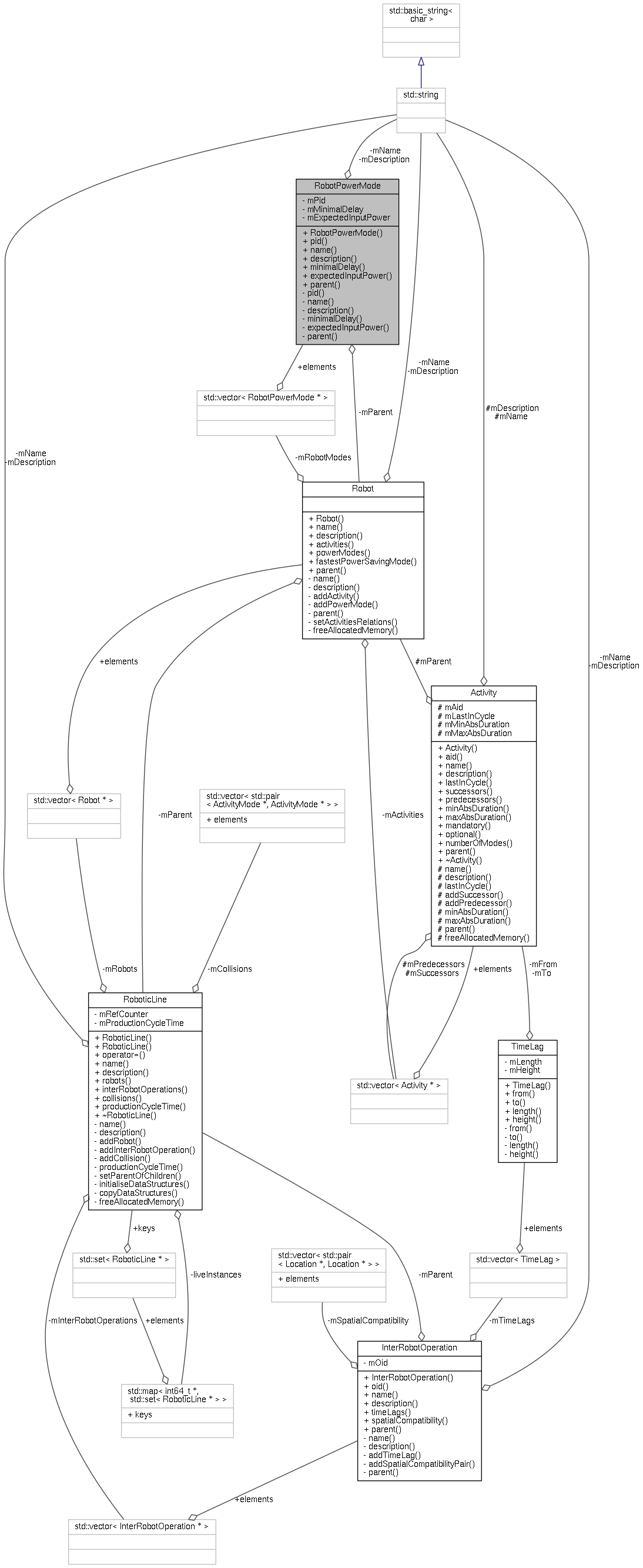
Public Member Functions | |
| RobotPowerMode (const uint32_t &pid) | |
| uint32_t | pid () const |
| std::string | name () const |
| std::string | description () const |
| double | minimalDelay () const |
| double | expectedInputPower () const |
| Robot * | parent () const |
Private Member Functions | |
| void | pid (const uint32_t &pid) |
| void | name (const std::string &name) |
| void | description (const std::string &description) |
| void | minimalDelay (const double &delay) |
| void | expectedInputPower (const double &expectedInputPower) |
| void | parent (Robot *parent) |
Private Attributes | |
| uint32_t | mPid |
| Identification of the power saving mode. | |
| std::string | mName |
| Name of this power saving mode, e.g. 'brakes', 'motors', 'bus-power-off', ... | |
| std::string | mDescription |
| Description of this power saving mode. | |
| double | mMinimalDelay |
| Minimal time needed for an application of this power saving mode. | |
| double | mExpectedInputPower |
| Expected input power of the robot (see mParent) for this power saving mode. | |
| Robot * | mParent |
| A robot that is equipped with this power saving mode. | |
Friends | |
| class | XmlReader |
| Enable an instance of XmlReader to fill the data. | |
| class | Robot |
| It allows the robot to set itself as a parent. | |
Detailed Description
It represents the power saving mode of the robot.
The class represents the power saving mode of the robot, which can be applied if the robot is in a stationary position. For example, the stationary robot can usually be held by electric motors (dummy power saving mode) or brakes. However, even deeper power saving modes such as bus-power-off and hibernate are possible for e.g. KUKA robots.
Definition at line 359 of file RoboticLine.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
