Instance of this class includes all the data structures and methods related to a robot. More...
#include <RoboticLine.h>
 Collaboration diagram for Robot:
Collaboration diagram for Robot: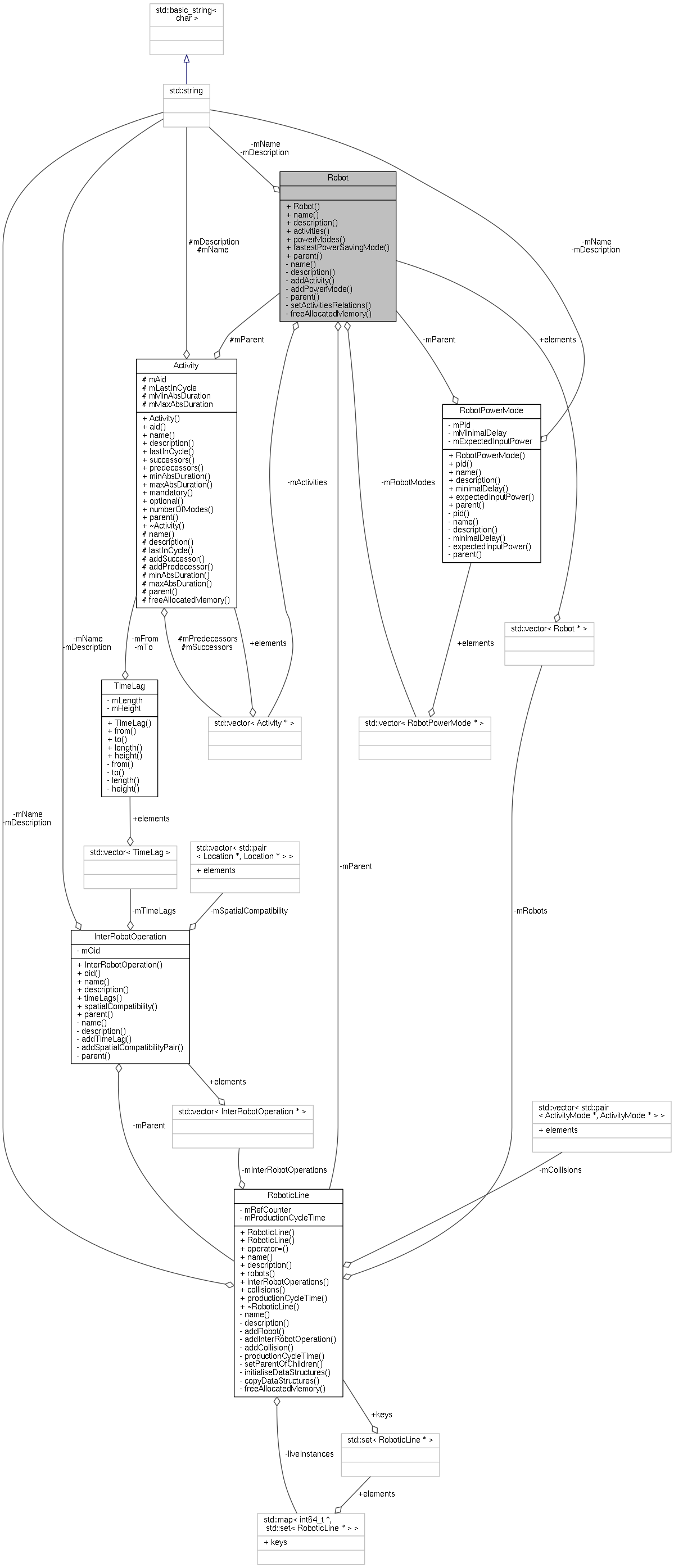
Public Member Functions | |
| std::string | name () const |
| std::string | description () const |
| std::vector< Activity * > | activities () const |
| std::vector< RobotPowerMode * > | powerModes () const |
| RobotPowerMode * | fastestPowerSavingMode () const |
| The power saving mode with the minimal time for an application is returned. | |
| RoboticLine * | parent () const |
Private Member Functions | |
| void | name (const std::string &name) |
| void | description (const std::string &description) |
| void | addActivity (Activity *a) |
| void | addPowerMode (RobotPowerMode *m) |
| void | parent (RoboticLine *parent) |
| void | setActivitiesRelations (const std::map< uint32_t, Location * > &pointToLocation, const std::map< Movement *, std::pair< uint32_t, uint32_t >> &movementToPoints) |
| It initializes precedences between activities (successors, predecessors). More... | |
| void | freeAllocatedMemory () |
Private Attributes | |
| std::string | mName |
| Name of the robot. | |
| std::string | mDescription |
| Description of the robot. | |
| std::vector< Activity * > | mActivities |
| Static (operations, waiting) and dynamic (movements) activities of the robot. | |
| std::vector< RobotPowerMode * > | mRobotModes |
| Applicable power saving modes for this robot. | |
| RoboticLine * | mParent |
| Robotic cell in which this robot is located. | |
Friends | |
| class | XmlReader |
| Enable an instance of XmlReader to call private methods and setters. | |
| class | RoboticLine |
| Full access of the related robotic cell is required for initialization. | |
Detailed Description
Instance of this class includes all the data structures and methods related to a robot.
An instance of this class corresponds to a robot with its operations and movements. The order of activities stems from the precedences between activities.
Definition at line 432 of file RoboticLine.h.
Member Function Documentation
|
private |
It initializes precedences between activities (successors, predecessors).
- Parameters
-
pointToLocation Mapping between coordinate identifications and locations. movementToPoints Mapping of movements to their start and end coordinate identifications.
Definition at line 218 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/RoboticLine.cpp
