Location of the robot used either during work (welding) or waiting. More...
#include <RoboticLine.h>
 Inheritance diagram for Location:
Inheritance diagram for Location: Collaboration diagram for Location:
Collaboration diagram for Location: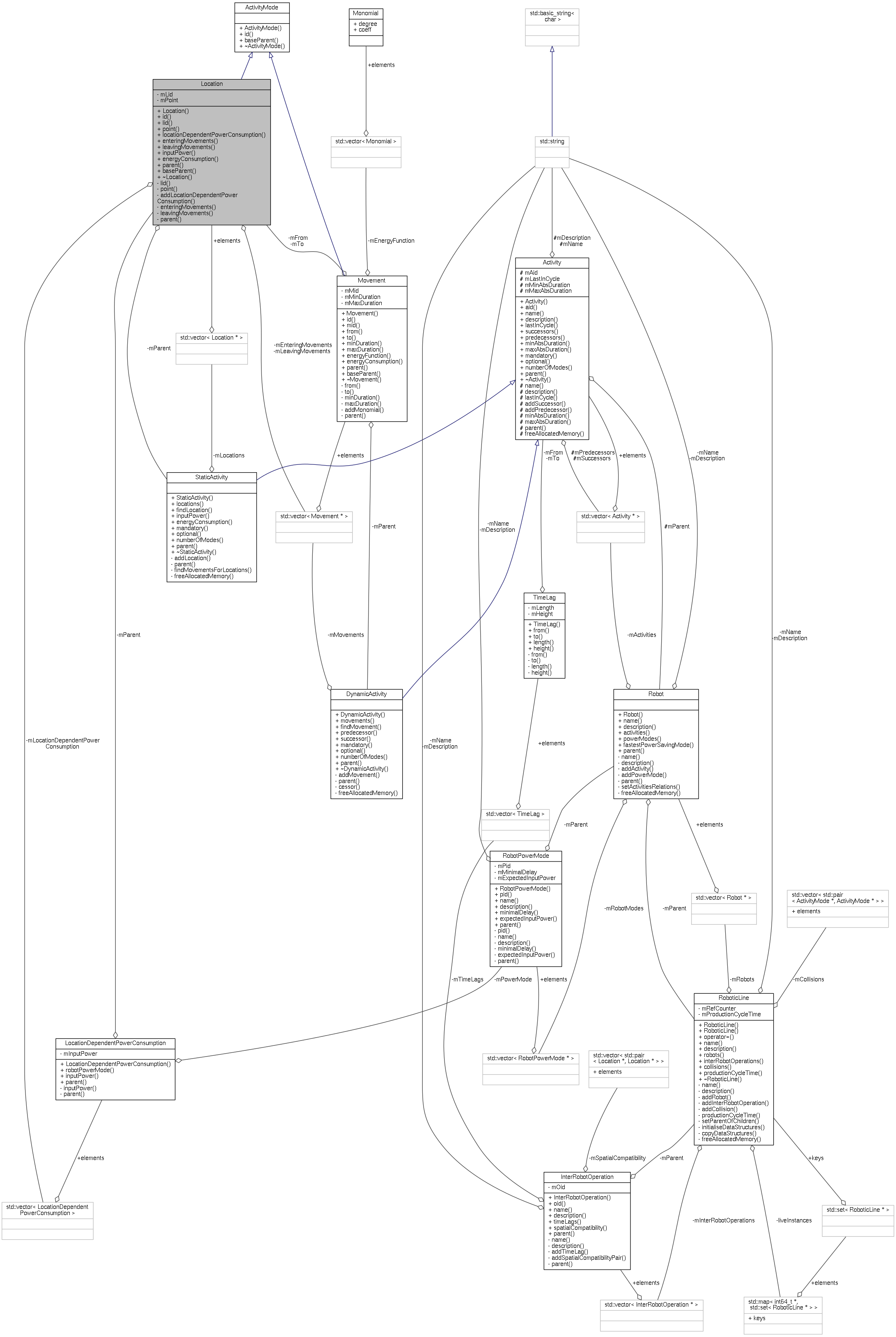
Public Member Functions | |
| Location (const uint32_t &lid=0) | |
| virtual uint32_t | id () const |
| uint32_t | lid () const |
| uint32_t | point () const |
| std::vector< LocationDependentPowerConsumption > | locationDependentPowerConsumption () const |
| std::vector< Movement * > | enteringMovements () const |
| std::vector< Movement * > | leavingMovements () const |
| double | inputPower (RobotPowerMode *m) const |
| double | energyConsumption (const double &duration, RobotPowerMode *m) const |
| StaticActivity * | parent () const |
| virtual Activity * | baseParent () const |
Private Member Functions | |
| void | lid (const uint32_t &lid) |
| void | point (const uint32_t &point) |
| void | addLocationDependentPowerConsumption (const LocationDependentPowerConsumption &ldpc) |
| void | enteringMovements (const std::vector< Movement * > &enteringMovements) |
| void | leavingMovements (const std::vector< Movement * > &leavingMovements) |
| void | parent (StaticActivity *parent) |
Private Attributes | |
| uint32_t | mLid |
| Identification of this location. | |
| uint32_t | mPoint |
| std::vector< LocationDependentPowerConsumption > | mLocationDependentPowerConsumption |
| std::vector< Movement * > | mEnteringMovements |
| The movements entering to this location. | |
| std::vector< Movement * > | mLeavingMovements |
| The movements leaving from this location. | |
| StaticActivity * | mParent |
| A parent of the location, i.e. static activity. | |
Friends | |
| class | XmlReader |
| Enable an instance of XmlReader class to set member variables. | |
| class | StaticActivity |
| Enable a static activity to declare its relation to the location. | |
Detailed Description
Location of the robot used either during work (welding) or waiting.
The instance of the class corresponds to a robot configuration, in which the robot can perform an operation on the workpiece/weldment. Even though the class is called Location, it represents not only the absolute coordinates of the operation but also orientation of the gun/gripper of the robot.
Definition at line 192 of file RoboticLine.h.
Member Function Documentation
| double Location::energyConsumption | ( | const double & | duration, |
| RobotPowerMode * | m | ||
| ) | const |
- Parameters
-
duration How long the robot is stationary. m Power saving mode of the robot.
- Returns
- Energy consumption of the stationary robot for the given duration.
Definition at line 56 of file RoboticLine.cpp.
| double Location::inputPower | ( | RobotPowerMode * | m | ) | const |
- Parameters
-
m Power saving mode of the robot.
- Returns
- Input power of the robot.
Definition at line 41 of file RoboticLine.cpp.
Member Data Documentation
|
private |
The power consumption of a stationary robot may also depend on its position, e.g. if the robot is held by its motors, and therefore, the vector mLocationDependentPowerConsumption defines the input power of the robot for these specific cases.
Definition at line 240 of file RoboticLine.h.
|
private |
A unique number representing a coordinate of the location. The optimization problem does not need exact coordinates since they are already incorporated in the energy functions.
Definition at line 234 of file RoboticLine.h.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/RoboticLine.cpp
