Collection of locations in which a robot operation (or waiting) can be performed. More...
#include <RoboticLine.h>
 Inheritance diagram for StaticActivity:
Inheritance diagram for StaticActivity: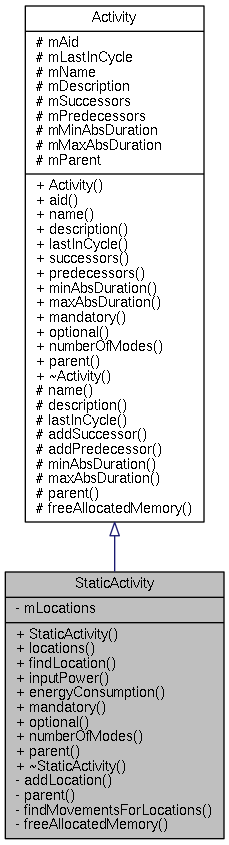 Collaboration diagram for StaticActivity:
Collaboration diagram for StaticActivity: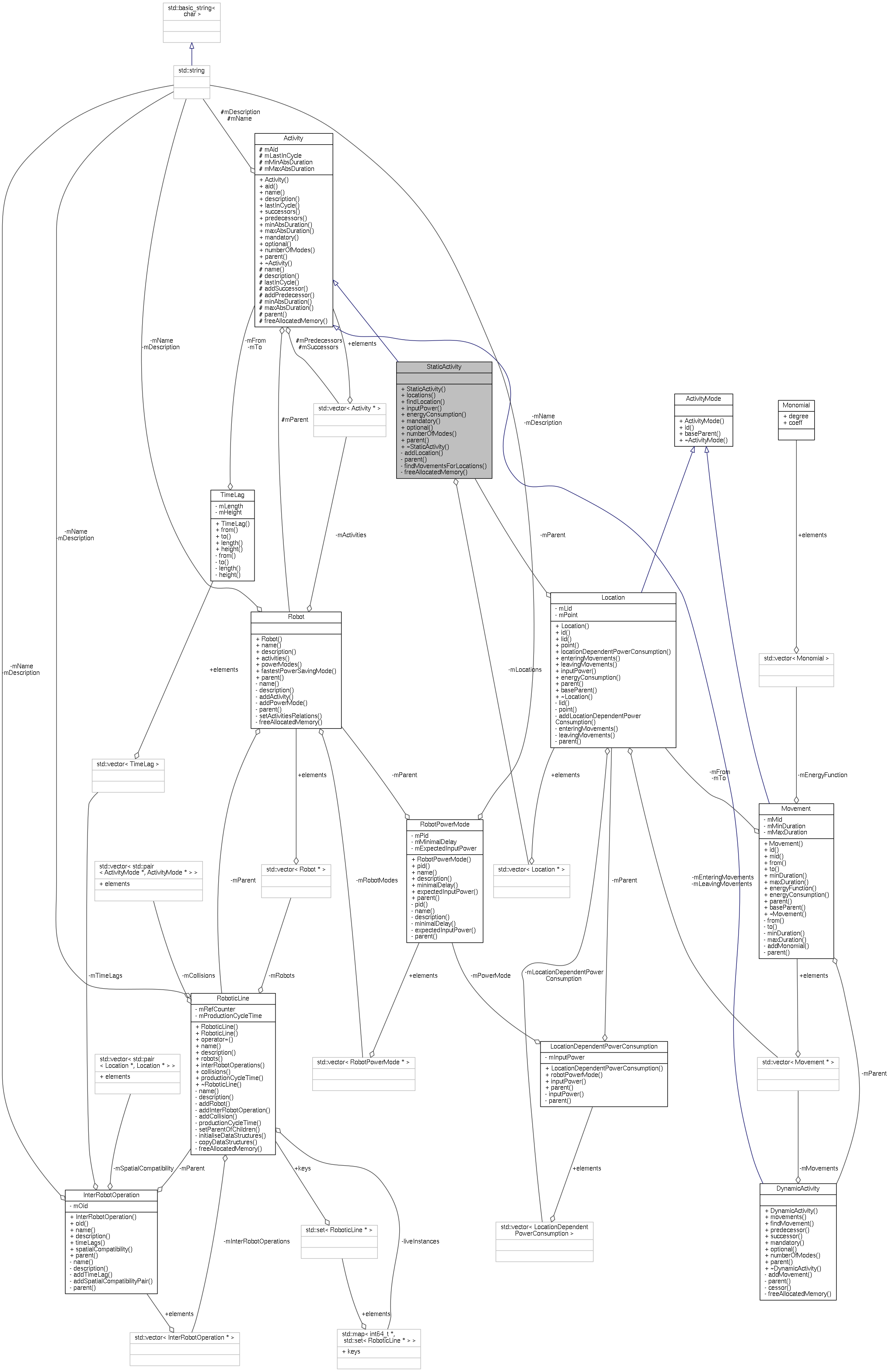
Public Member Functions | |
| StaticActivity (const uint32_t &aid) | |
| std::vector< Location * > | locations () const |
| Location * | findLocation (const uint32_t &lid) const |
| It finds a location according to its identification. More... | |
| double | inputPower (const uint32_t &lid, const uint32_t &pid) const |
| double | energyConsumption (double duration, const uint32_t &lid, const uint32_t &pid) const |
| virtual bool | mandatory () const |
| Each static activity is mandatory since it has to be performed. | |
| virtual bool | optional () const |
| None of static activities is optional since all of them have to be performed. | |
| virtual size_t | numberOfModes () const |
| virtual Robot * | parent () const |
| Public Member Functions inherited from Activity | |
| Activity (const uint32_t &aid) | |
| uint32_t | aid () const |
| std::string | name () const |
| std::string | description () const |
| bool | lastInCycle () const |
| std::vector< Activity * > | successors () const |
| std::vector< Activity * > | predecessors () const |
| double | minAbsDuration () const |
| double | maxAbsDuration () const |
Private Member Functions | |
| void | addLocation (Location *p) |
| virtual void | parent (Robot *parent) |
| void | findMovementsForLocations () |
| Method assigns entering and leaving movements to each location in mLocations. | |
| virtual void | freeAllocatedMemory () |
Private Attributes | |
| std::vector< Location * > | mLocations |
| Each static activity consists of possible robot positions, i.e. locations. | |
Friends | |
| class | XmlReader |
| Enable an instance of XmlReader class to add locations. | |
| class | Robot |
| Enable the parent robot to call findMovementsForLocations method. | |
| class | ParallelHeuristicSolver |
| It allows the parallel heuristic to directly access mLocations array to avoid copying. | |
Additional Inherited Members | |
| Protected Member Functions inherited from Activity | |
| void | name (const std::string &name) |
| void | description (const std::string &description) |
| void | lastInCycle (const bool &lastInCycle) |
| void | addSuccessor (Activity *successor) |
| void | addPredecessor (Activity *predecessor) |
| void | minAbsDuration (const double &minAbsDuration) |
| void | maxAbsDuration (const double &maxAbsDuration) |
| Protected Attributes inherited from Activity | |
| uint32_t | mAid |
| Identification of the activity. | |
| bool | mLastInCycle |
| It determines whether the activity closes the robot cycle. | |
| std::string | mName |
| Name of the activity. | |
| std::string | mDescription |
| Description of the activity. | |
| std::vector< Activity * > | mSuccessors |
| Successors of the activity. | |
| std::vector< Activity * > | mPredecessors |
| Predecessors of the activity. | |
| double | mMinAbsDuration |
| Minimal possible duration of the activity. | |
| double | mMaxAbsDuration |
| Maximal possible duration of the activity. | |
| Robot * | mParent |
| Pointer to the parent, i.e. a robot performing this activity. | |
Detailed Description
Collection of locations in which a robot operation (or waiting) can be performed.
The static activity represents a collection of locations, i.e. robot configurations, in which some operation (or waiting) such as e.g. welding, cutting, or assembling can be performed. In the final solution, only one location is selected for each static activity.
Definition at line 304 of file RoboticLine.h.
Member Function Documentation
| double StaticActivity::energyConsumption | ( | double | duration, |
| const uint32_t & | lid, | ||
| const uint32_t & | pid | ||
| ) | const |
- Parameters
-
duration Requested duration of this static activity. lid Identification of a location belonging to this activity. pid Identification of the power saving mode of the robot Activity::mParent.
- Returns
- Calculated energy consumption of this activity for given parameters.
Definition at line 182 of file RoboticLine.cpp.
| Location * StaticActivity::findLocation | ( | const uint32_t & | lid | ) | const |
It finds a location according to its identification.
- Parameters
-
lid Identification of a location.
- Returns
- A pointer to the location with lid identification.
- See also
- DynamicActivity::findMovement
Definition at line 157 of file RoboticLine.cpp.
| double StaticActivity::inputPower | ( | const uint32_t & | lid, |
| const uint32_t & | pid | ||
| ) | const |
- Parameters
-
lid Identification of a location belonging to this activity. pid Identification of the power saving mode of the robot Activity::mParent.
- Returns
- Input power of the robot for the given location and power saving mode.
Definition at line 167 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/RoboticLine.cpp
