Collection of movements between two static activities. More...
#include <RoboticLine.h>
 Inheritance diagram for DynamicActivity:
Inheritance diagram for DynamicActivity: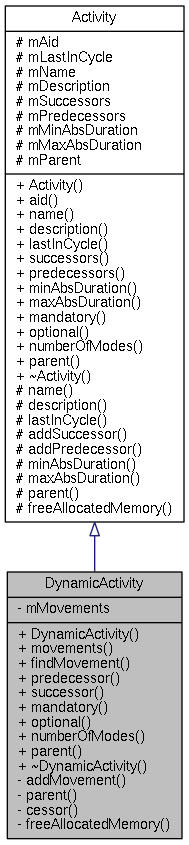 Collaboration diagram for DynamicActivity:
Collaboration diagram for DynamicActivity: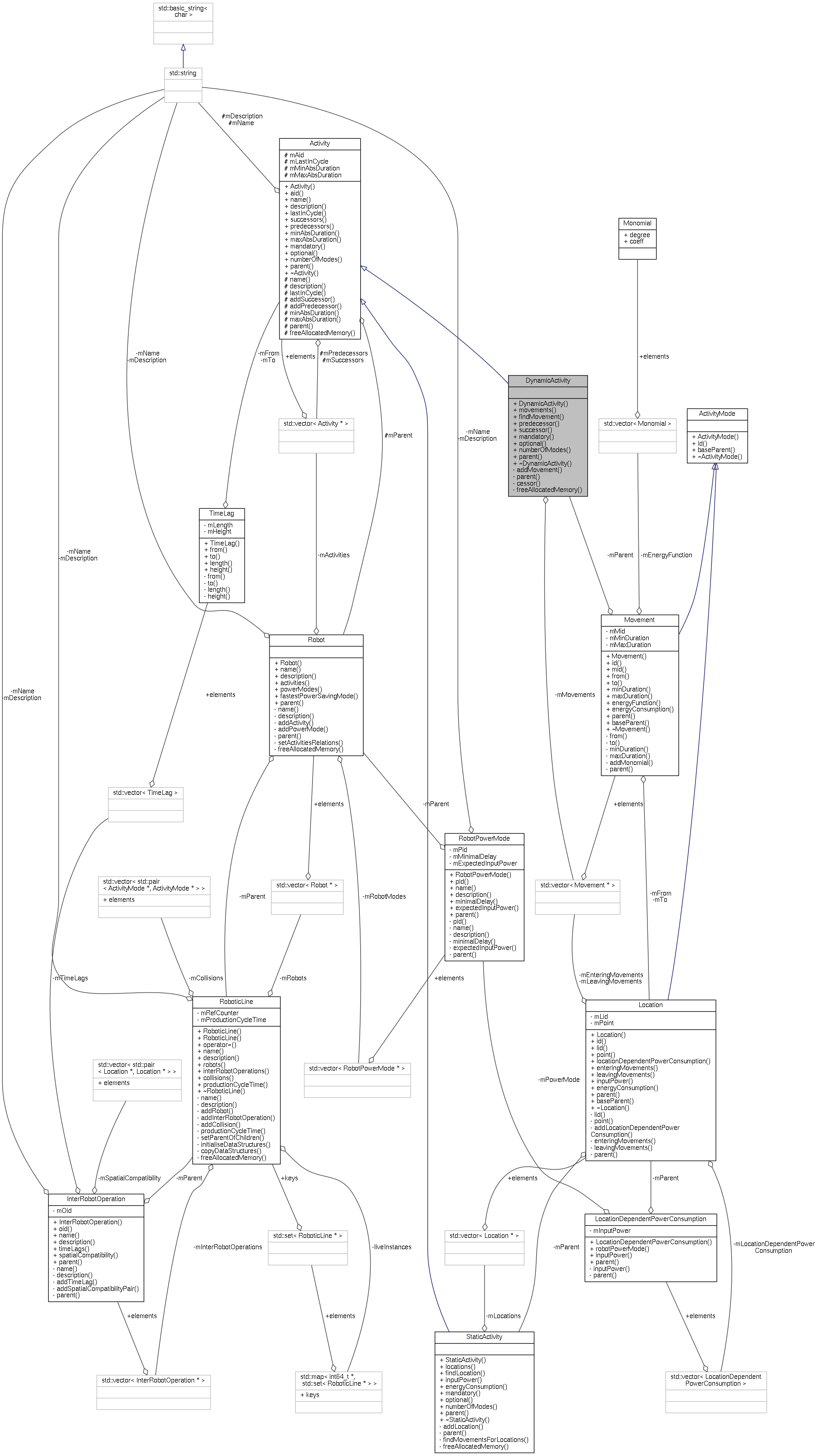
Public Member Functions | |
| DynamicActivity (const uint32_t &aid) | |
| std::vector< Movement * > | movements () const |
| Movement * | findMovement (const uint32_t &mid) const |
| It finds a movement according to its identification. More... | |
| StaticActivity * | predecessor () const |
| StaticActivity * | successor () const |
| virtual bool | mandatory () const |
| It returns whether this dynamic activity has to be performed. | |
| virtual bool | optional () const |
| It returns whether this dynamic activity is optional, i.e. may or may not be performed. | |
| virtual size_t | numberOfModes () const |
| virtual Robot * | parent () const |
| Public Member Functions inherited from Activity | |
| Activity (const uint32_t &aid) | |
| uint32_t | aid () const |
| std::string | name () const |
| std::string | description () const |
| bool | lastInCycle () const |
| std::vector< Activity * > | successors () const |
| std::vector< Activity * > | predecessors () const |
| double | minAbsDuration () const |
| double | maxAbsDuration () const |
Private Member Functions | |
| void | addMovement (Movement *mv) |
| virtual void | parent (Robot *parent) |
| StaticActivity * | cessor (const std::string &prefix) const |
| virtual void | freeAllocatedMemory () |
Private Attributes | |
| std::vector< Movement * > | mMovements |
| The movements of this dynamic activity. | |
Friends | |
| class | XmlReader |
| Enable an instance of XmlReader class to add movements. | |
Additional Inherited Members | |
| Protected Member Functions inherited from Activity | |
| void | name (const std::string &name) |
| void | description (const std::string &description) |
| void | lastInCycle (const bool &lastInCycle) |
| void | addSuccessor (Activity *successor) |
| void | addPredecessor (Activity *predecessor) |
| void | minAbsDuration (const double &minAbsDuration) |
| void | maxAbsDuration (const double &maxAbsDuration) |
| Protected Attributes inherited from Activity | |
| uint32_t | mAid |
| Identification of the activity. | |
| bool | mLastInCycle |
| It determines whether the activity closes the robot cycle. | |
| std::string | mName |
| Name of the activity. | |
| std::string | mDescription |
| Description of the activity. | |
| std::vector< Activity * > | mSuccessors |
| Successors of the activity. | |
| std::vector< Activity * > | mPredecessors |
| Predecessors of the activity. | |
| double | mMinAbsDuration |
| Minimal possible duration of the activity. | |
| double | mMaxAbsDuration |
| Maximal possible duration of the activity. | |
| Robot * | mParent |
| Pointer to the parent, i.e. a robot performing this activity. | |
Detailed Description
Collection of movements between two static activities.
The dynamic activity represents a collection of possible movements between two static activities. In the final solution, at most one movement can be selected for each dynamic activity due to the alternatives, i.e. the possibility to select from multiple process plans - activity orders.
Definition at line 261 of file RoboticLine.h.
Member Function Documentation
|
private |
- Parameters
-
prefix Either "prede" or "suc".
- Returns
- Successor or predecessor of this activity depending on prefix parameter.
Definition at line 77 of file RoboticLine.cpp.
| Movement * DynamicActivity::findMovement | ( | const uint32_t & | mid | ) | const |
It finds a movement according to its identification.
- Parameters
-
mid Identification of a movement.
- Returns
- A pointer to the movement with mid identification.
- See also
- StaticActivity::findLocation
Definition at line 67 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/RoboticLine.cpp
