The instance of the class corresponds to a robot movement between two coordinates. More...
#include <RoboticLine.h>
 Inheritance diagram for Movement:
Inheritance diagram for Movement: Collaboration diagram for Movement:
Collaboration diagram for Movement: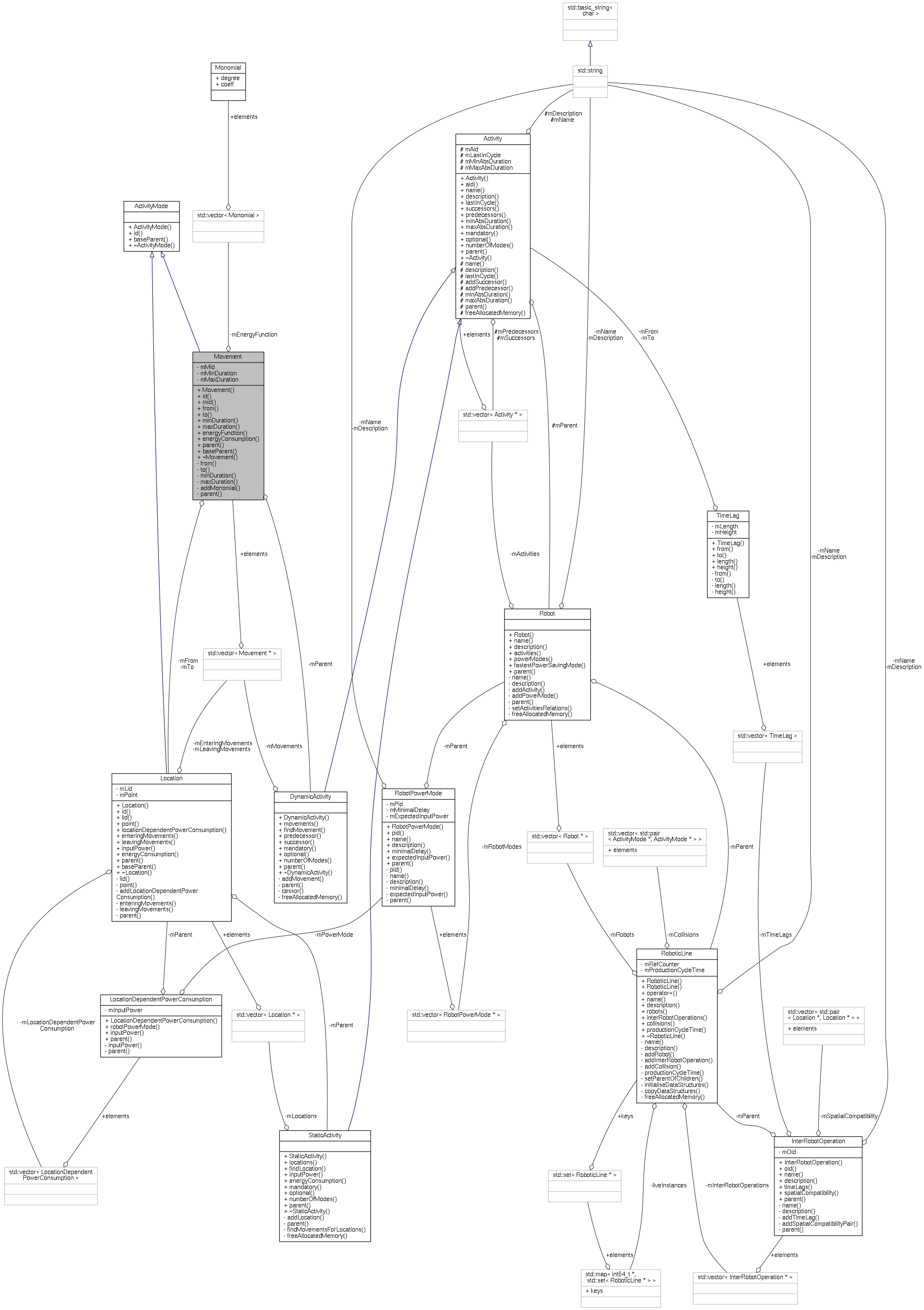
Public Member Functions | |
| Movement (const uint32_t &mid) | |
| virtual uint32_t | id () const |
| uint32_t | mid () const |
| Location * | from () const |
| Location * | to () const |
| double | minDuration () const |
| double | maxDuration () const |
| std::vector< Monomial > | energyFunction () const |
| double | energyConsumption (const double &duration) const |
| DynamicActivity * | parent () const |
| virtual Activity * | baseParent () const |
Private Member Functions | |
| void | from (Location *from) |
| void | to (Location *to) |
| void | minDuration (const double &minDuration) |
| void | maxDuration (const double &maxDuration) |
| void | addMonomial (const Monomial &m) |
| void | parent (DynamicActivity *parent) |
Private Attributes | |
| uint32_t | mMid |
| Movement identification. | |
| Location * | mFrom |
| Location representing the start coordinate of the movement. | |
| Location * | mTo |
| Location representing the end coordinate of the movement. | |
| double | mMinDuration |
| The minimal possible duration of the robot movement. | |
| double | mMaxDuration |
| The maximal duration of the movement. | |
| std::vector< Monomial > | mEnergyFunction |
| DynamicActivity * | mParent |
| Parent of the movement, i.e. a dynamic activity. | |
Friends | |
| class | XmlReader |
| Enable an instance of XmlReader class to set member variables. | |
| class | DynamicActivity |
| Enable the parent to set a pointer to him. | |
| class | Robot |
| Enable a robot to establish relations between activities, i.e. to set mFrom and mTo members. | |
Detailed Description
The instance of the class corresponds to a robot movement between two coordinates.
Definition at line 133 of file RoboticLine.h.
Member Function Documentation
| double Movement::energyConsumption | ( | const double & | duration | ) | const |
- Parameters
-
duration Duration of the movement.
- Returns
- Energy consumption of the movement for the given duration.
Definition at line 31 of file RoboticLine.cpp.
Member Data Documentation
|
private |
Energy function, the relation between the duration and required energy for the movement, is modeled as a sum of monomials stored in mEnergyFunction vector.
Definition at line 173 of file RoboticLine.h.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/RoboticLine.cpp
