The instance of this class specifies input power of the robot for a particular robot configuration and power saving mode. More...
#include <RoboticLine.h>
 Collaboration diagram for LocationDependentPowerConsumption:
Collaboration diagram for LocationDependentPowerConsumption: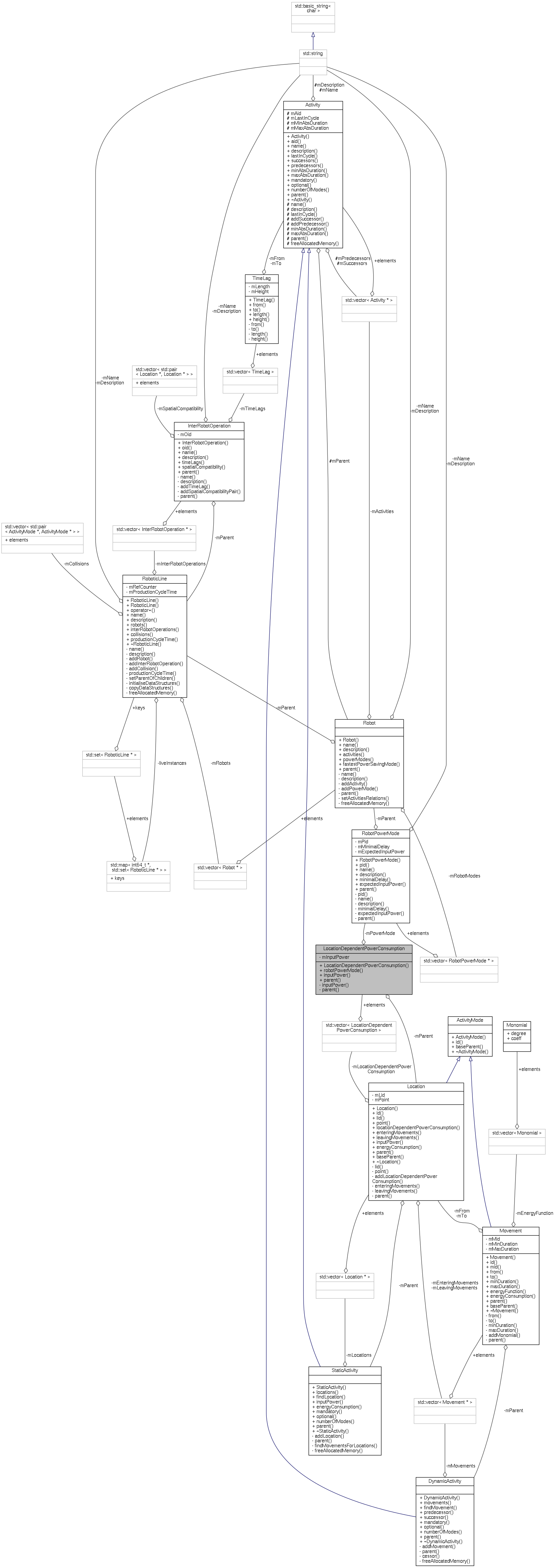
Public Member Functions | |
| LocationDependentPowerConsumption (const RobotPowerMode *rpm) | |
| const RobotPowerMode * | robotPowerMode () const |
| double | inputPower () const |
| Location * | parent () const |
Private Member Functions | |
| void | inputPower (const double &inputPower) |
| void | parent (Location *parent) |
Private Attributes | |
| const RobotPowerMode * | mPowerMode |
| The power saving mode which input power is location dependent. | |
| double | mInputPower |
| Location dependent input power. | |
| Location * | mParent |
| Parent of this class is the related location for which the input power is calculated. | |
Friends | |
| class | XmlReader |
| Enable an instance of XmlReader to call setters. | |
| class | Location |
| It allows the location to set itself as a parent. | |
Detailed Description
The instance of this class specifies input power of the robot for a particular robot configuration and power saving mode.
Input power of the robot is also dependent on the robot configuration for some power saving modes, for example, if the robot is held by motors then the power consumption is different for the robot being stretched out or robot at home position. This class can be perceived as an extension to RobotPowerMode class as it adds the information about input power for a particular robot configuration, i.e. location (see also Location class).
Definition at line 403 of file RoboticLine.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
