The robotic cell corresponds to an instance of this class. More...
#include <RoboticLine.h>
 Collaboration diagram for RoboticLine:
Collaboration diagram for RoboticLine: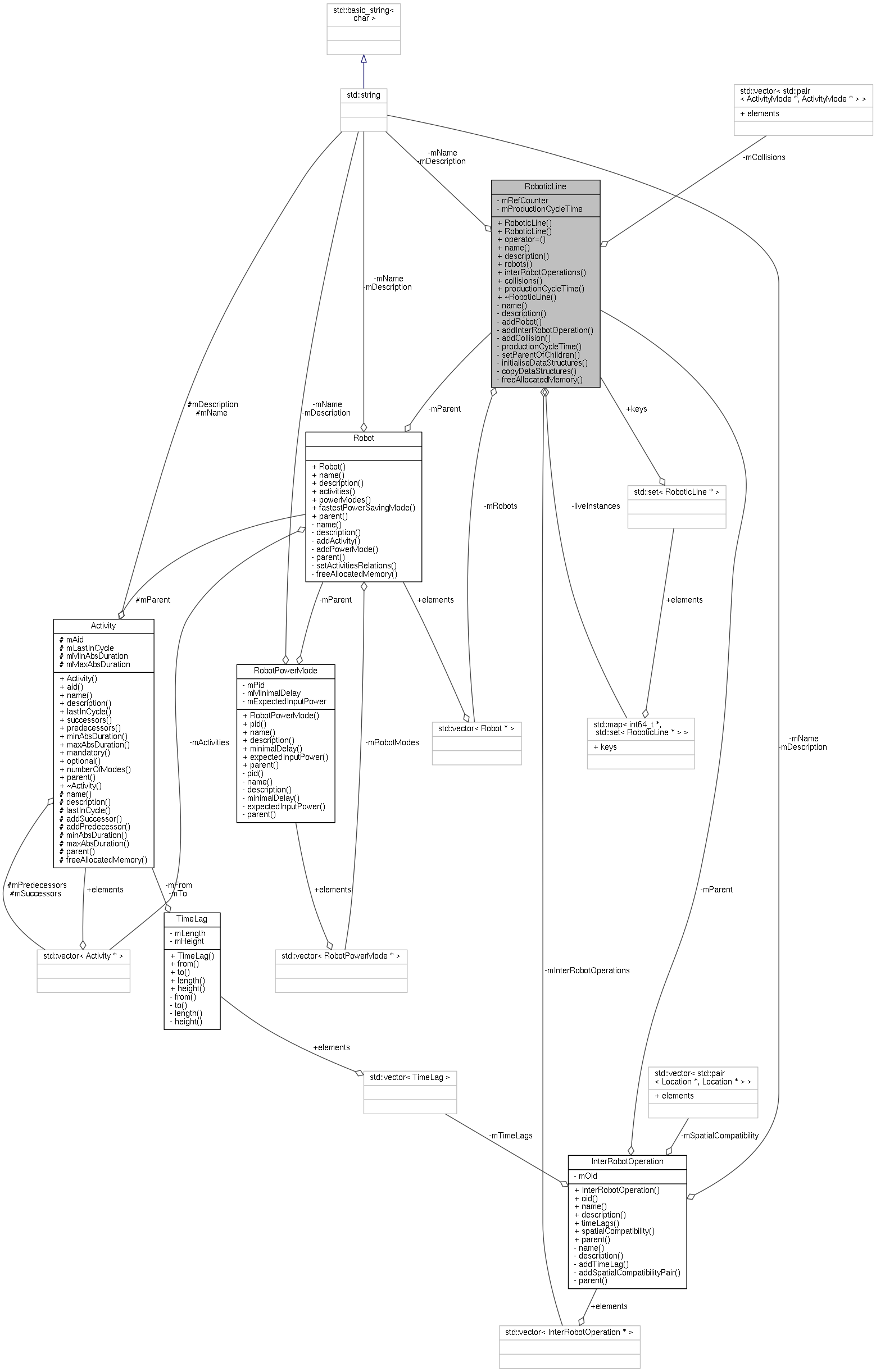
Public Member Functions | |
| RoboticLine (const RoboticLine &l) | |
| RoboticLine & | operator= (const RoboticLine &l) |
| std::string | name () const |
| std::string | description () const |
| std::vector< Robot * > | robots () const |
| std::vector< InterRobotOperation * > | interRobotOperations () const |
| std::vector< std::pair< ActivityMode *, ActivityMode * > > | collisions () const |
| double | productionCycleTime () const |
Private Member Functions | |
| void | name (const std::string &name) |
| void | description (const std::string &description) |
| void | addRobot (Robot *r) |
| void | addInterRobotOperation (InterRobotOperation *op) |
| void | addCollision (const std::pair< ActivityMode *, ActivityMode * > &collision) |
| void | productionCycleTime (const double &productionCycleTime) |
| void | setParentOfChildren (RoboticLine *rl) |
| This method is propagated through all the parts of the robotic cell in order to set parents. More... | |
| void | initialiseDataStructures (const std::map< uint32_t, Location * > &pointToLocation, const std::map< Movement *, std::pair< uint32_t, uint32_t >> &movementToPoints) |
| It recursively sets parents and initializes relations between activities. More... | |
| void | copyDataStructures (const RoboticLine &r) |
| void | freeAllocatedMemory () |
Private Attributes | |
| int64_t * | mRefCounter |
| Counter of references, the number of shallow copies sharing the same data. | |
| std::string | mName |
| Name of the robotic cell. | |
| std::string | mDescription |
| Description of the robotic cell. | |
| std::vector< Robot * > | mRobots |
| Robots located in this cell. | |
| std::vector< InterRobotOperation * > | mInterRobotOperations |
| Inter-robot operations between robots. | |
| std::vector< std::pair< ActivityMode *, ActivityMode * > > | mCollisions |
| Collisions between robots defined as time disjunctive pairs. | |
| double | mProductionCycleTime |
| Production cycle time, also called robot cycle time. | |
Static Private Attributes | |
| static std::map< int64_t *, std::set< RoboticLine * > > | liveInstances |
| Track of dynamically created instances, needed for managing the memory. | |
Friends | |
| class | XmlReader |
| XmlReader should be allowed to fill the data-structures of the robotic cell. | |
Detailed Description
The robotic cell corresponds to an instance of this class.
The instance of this class corresponds to the whole robotic cell including its robots, operations, synchronizations, and collisions.
- Note
- The robotic cell is immutable (read-only) after it has been filled.
Definition at line 563 of file RoboticLine.h.
Member Function Documentation
|
private |
It recursively sets parents and initializes relations between activities.
- Parameters
-
pointToLocation Mapping between coordinate identifications and locations. movementToPoints Mapping of movements to their start and end coordinate identifications.
Definition at line 325 of file RoboticLine.cpp.
|
private |
This method is propagated through all the parts of the robotic cell in order to set parents.
- Parameters
-
rl Instance of this class.
Definition at line 318 of file RoboticLine.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/RoboticLine.cpp
