The inter-robot operation corresponding to the workpiece/weldment handling. More...
#include <RoboticLine.h>
 Collaboration diagram for InterRobotOperation:
Collaboration diagram for InterRobotOperation: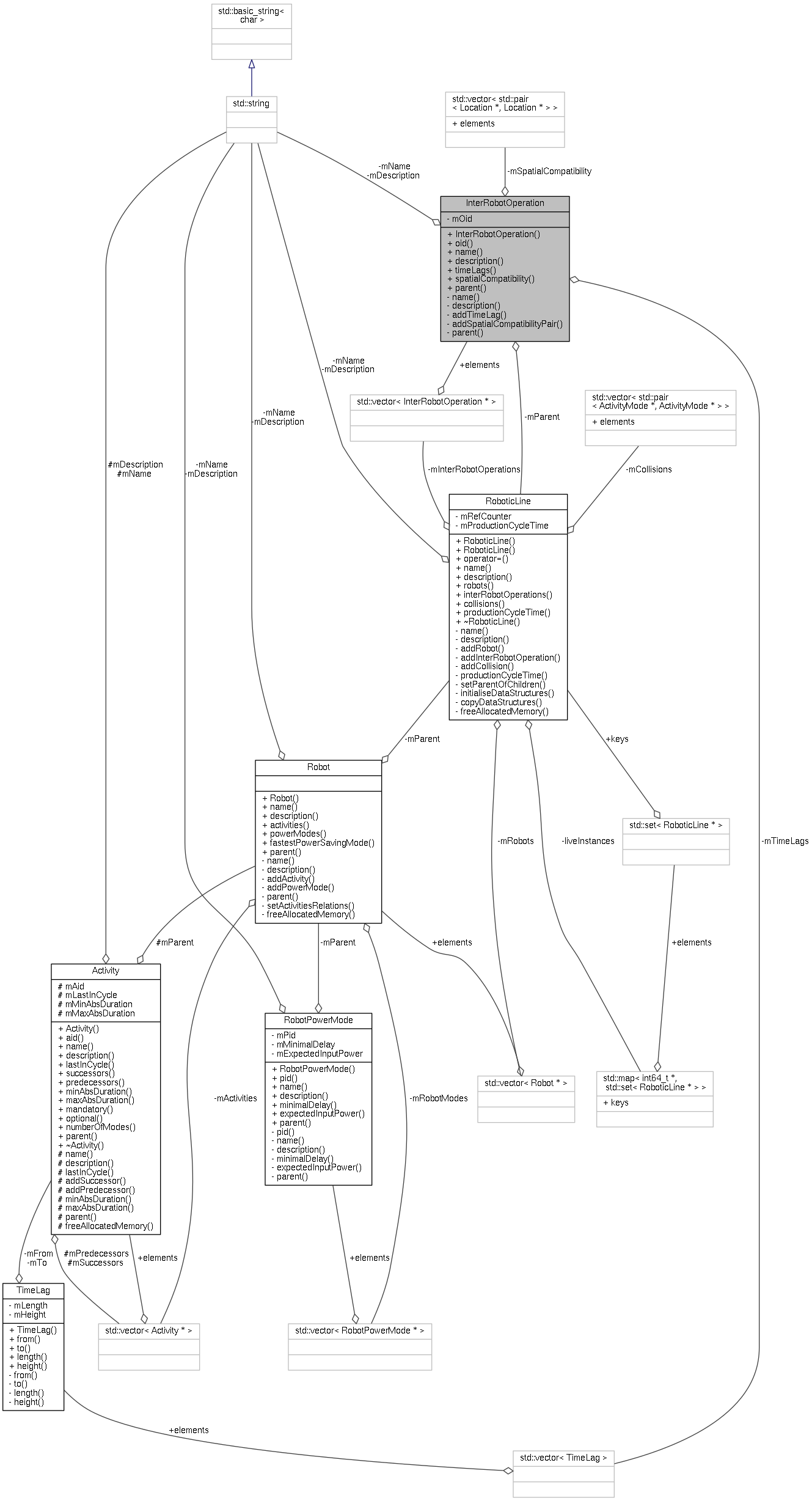
Public Member Functions | |
| InterRobotOperation (const uint32_t &oid) | |
| uint32_t | oid () const |
| std::string | name () const |
| std::string | description () const |
| std::vector< TimeLag > | timeLags () const |
| std::vector< std::pair< Location *, Location * > > | spatialCompatibility () const |
| RoboticLine * | parent () const |
Private Member Functions | |
| void | name (const std::string &name) |
| void | description (const std::string &description) |
| void | addTimeLag (const TimeLag &lag) |
| void | addSpatialCompatibilityPair (Location *l1, Location *l2) |
| void | parent (RoboticLine *parent) |
Private Attributes | |
| uint32_t | mOid |
| Identification of this inter-robot operation. | |
| std::string | mName |
| Name of this inter-robot operation. | |
| std::string | mDescription |
| Description of this inter-robot operation. | |
| std::vector< TimeLag > | mTimeLags |
| Time lags ensuring desired time synchronizations. | |
| std::vector< std::pair< Location *, Location * > > | mSpatialCompatibility |
| List of compatible location pairs for the handover(s). More... | |
| RoboticLine * | mParent |
| A parent of the inter-robot operation is the robotic cell. | |
Friends | |
| class | XmlReader |
| An instance of the XmlReader class calls the private setters. | |
| class | RoboticLine |
| The robotic cell is allowed to set itself as a parent. | |
Detailed Description
The inter-robot operation corresponding to the workpiece/weldment handling.
The class corresponds to the inter-robot operation, e.g. a workpiece/weldment passing. It incorporates time lags and spatial compatibility pairs to guarantee that a cooperation takes place in the right location at the right time.
Definition at line 518 of file RoboticLine.h.
Member Data Documentation
List of compatible location pairs for the handover(s).
- Note
- If the vector is empty then all the possible pairs are allowed.
Definition at line 546 of file RoboticLine.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
