Instance of TimeLag class defines a time relation between two different robots. More...
#include <RoboticLine.h>
 Collaboration diagram for TimeLag:
Collaboration diagram for TimeLag: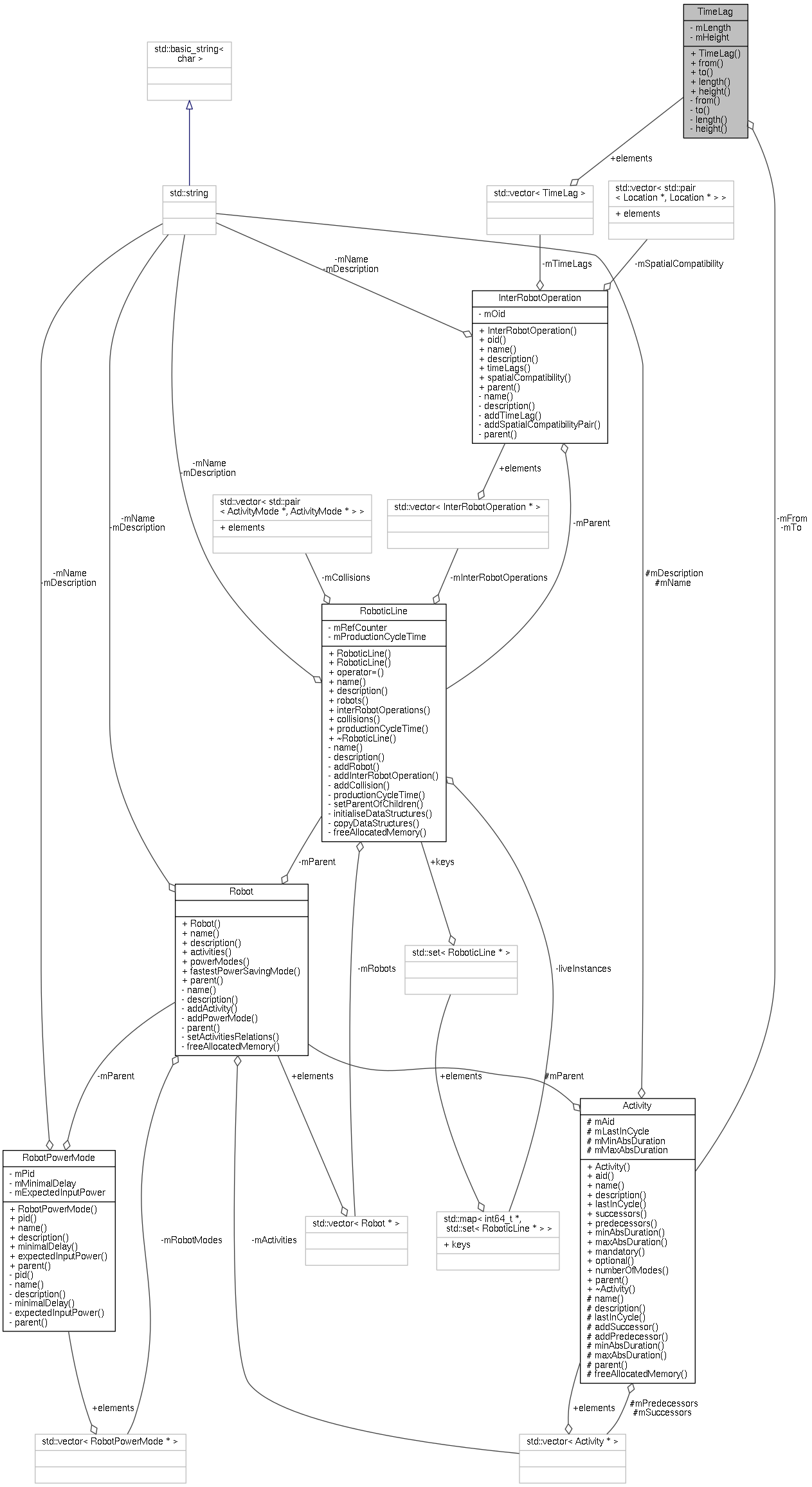
Public Member Functions | |
| TimeLag (Activity *f, Activity *t, double l, int32_t h) | |
It constructs an instance corresponding to  equation where equation where  and and  are start times of activity t and f respectively, and are start times of activity t and f respectively, and  is the production cycle time. More... is the production cycle time. More... | |
| Activity * | from () const |
| Activity * | to () const |
| double | length () const |
| int32_t | height () const |
Private Member Functions | |
| void | from (Activity *from) |
| void | to (Activity *to) |
| void | length (const double &length) |
| void | height (const int32_t &height) |
Private Attributes | |
| Activity * | mFrom |
| The activity from which the arc is leaving. | |
| Activity * | mTo |
| The activity to which the arc is entering. | |
| double | mLength |
| The time offset of the inter-robot arc. | |
| int32_t | mHeight |
| The time offset in the number of cycles. | |
Detailed Description
Instance of TimeLag class defines a time relation between two different robots.
The time synchronization of robots is accomplished by using time lags. Multiple instances of this class can model e.g. a workpiece/weldment passing, which can be carried out either directly, i.e. gripper-to-gripper, or by using the bench.
Definition at line 481 of file RoboticLine.h.
Constructor & Destructor Documentation
It constructs an instance corresponding to equation where and are start times of activity t and f respectively, and is the production cycle time.
- Parameters
-
f The activity from which the arc is leaving. t The activity to which the arc is entering. l The time offset of the inter-robot arc. h It indexes the previous or current cycles of a related robot.
Definition at line 491 of file RoboticLine.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/RoboticLine.h
