A short-term memory, containing a list of forbidden moves, that mitigates the risk of cycling. More...
#include <DataStructures.h>
 Collaboration diagram for TabuList:
Collaboration diagram for TabuList: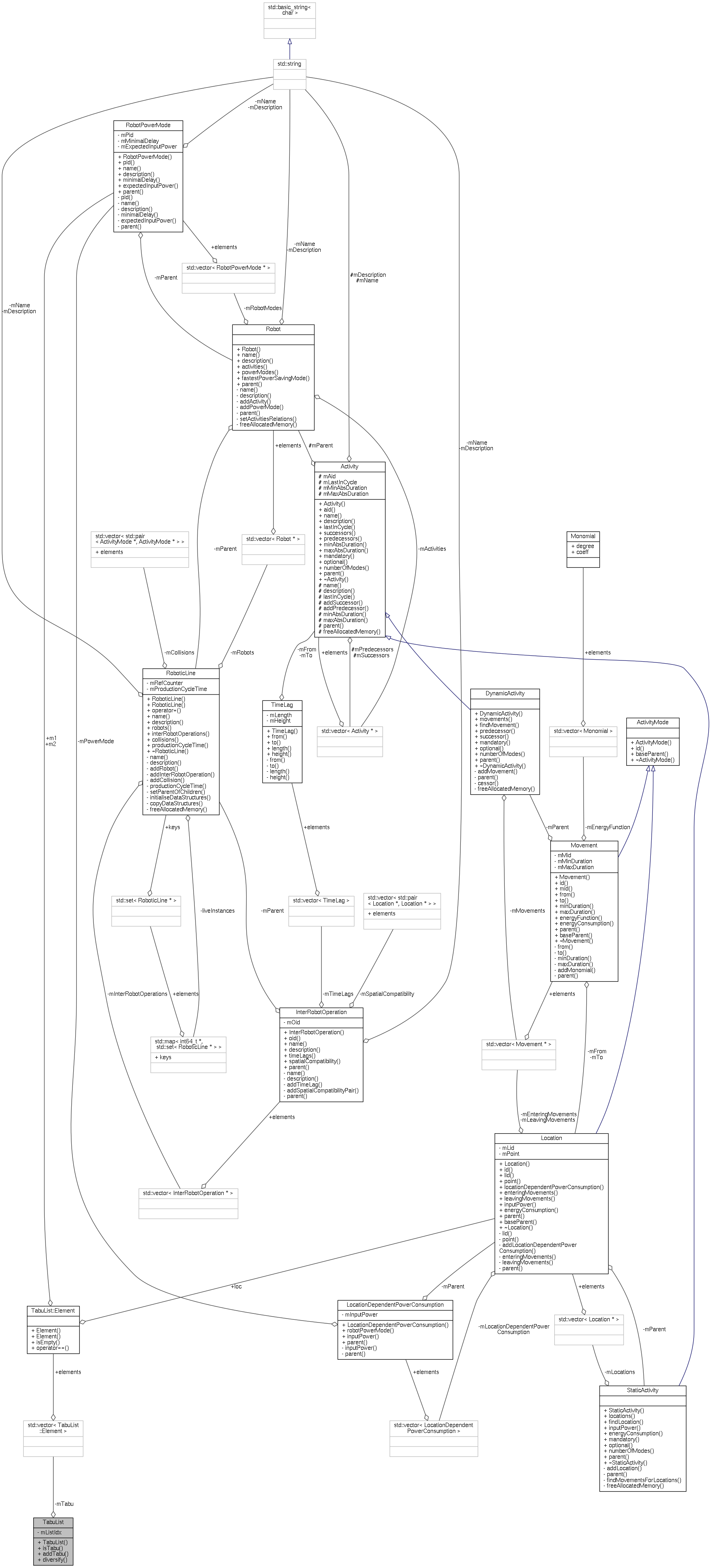
Classes | |
| struct | Element |
| An element of the tabu list. More... | |
Public Member Functions | |
| TabuList (const uint32_t &tabuListSize) | |
| Constructs a tabu list with the fixed size. | |
| bool | isTabu (Location *l, RobotPowerMode *from, RobotPowerMode *to) const |
| It checks whether the modification of a partial solution is allowed, i.e. the move/modification is not tabu. More... | |
| void | addTabu (Location *l, RobotPowerMode *from, RobotPowerMode *to) |
| It adds a performed modification into the tabu list. More... | |
| void | diversify () |
Private Attributes | |
| uint32_t | mListIdx |
| Current index to the tabu list, i.e. a current write position. | |
| std::vector< Element > | mTabu |
| Tabu list containing the forbidden modifications. | |
Detailed Description
A short-term memory, containing a list of forbidden moves, that mitigates the risk of cycling.
Tabu search meta-heuristic employs a tabu list, a list of recently performed modifications, to avoid cycling in the solution space. The list is a short-term memory, i.e. the oldest modifications are gradually replaced by the newer ones, that allows to intensify the searching process.
Definition at line 254 of file DataStructures.h.
Member Function Documentation
|
inline |
It adds a performed modification into the tabu list.
- Parameters
-
l A location where the selected power saving mode was applied. from,to The power saving mode from was switched to to.
Definition at line 274 of file DataStructures.h.
|
inline |
If the tabu list contains all the viable modifications, i.e. there is not a modification that could be applied, then some random tabu list elements are removed to allow the sub-heuristic to progress.
Definition at line 288 of file DataStructures.h.
|
inline |
It checks whether the modification of a partial solution is allowed, i.e. the move/modification is not tabu.
- Parameters
-
l A location where the selected power saving mode will be changed. from,to The power saving mode of the robot will be switched from from to to.
- Returns
- Whether the modification is allowed.
Definition at line 265 of file DataStructures.h.
The documentation for this class was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/HeuristicSolver/DataStructures.h
