The structure stores how to resolve one collision between robots. More...
#include <DataStructures.h>
 Collaboration diagram for CollisionResolution:
Collaboration diagram for CollisionResolution: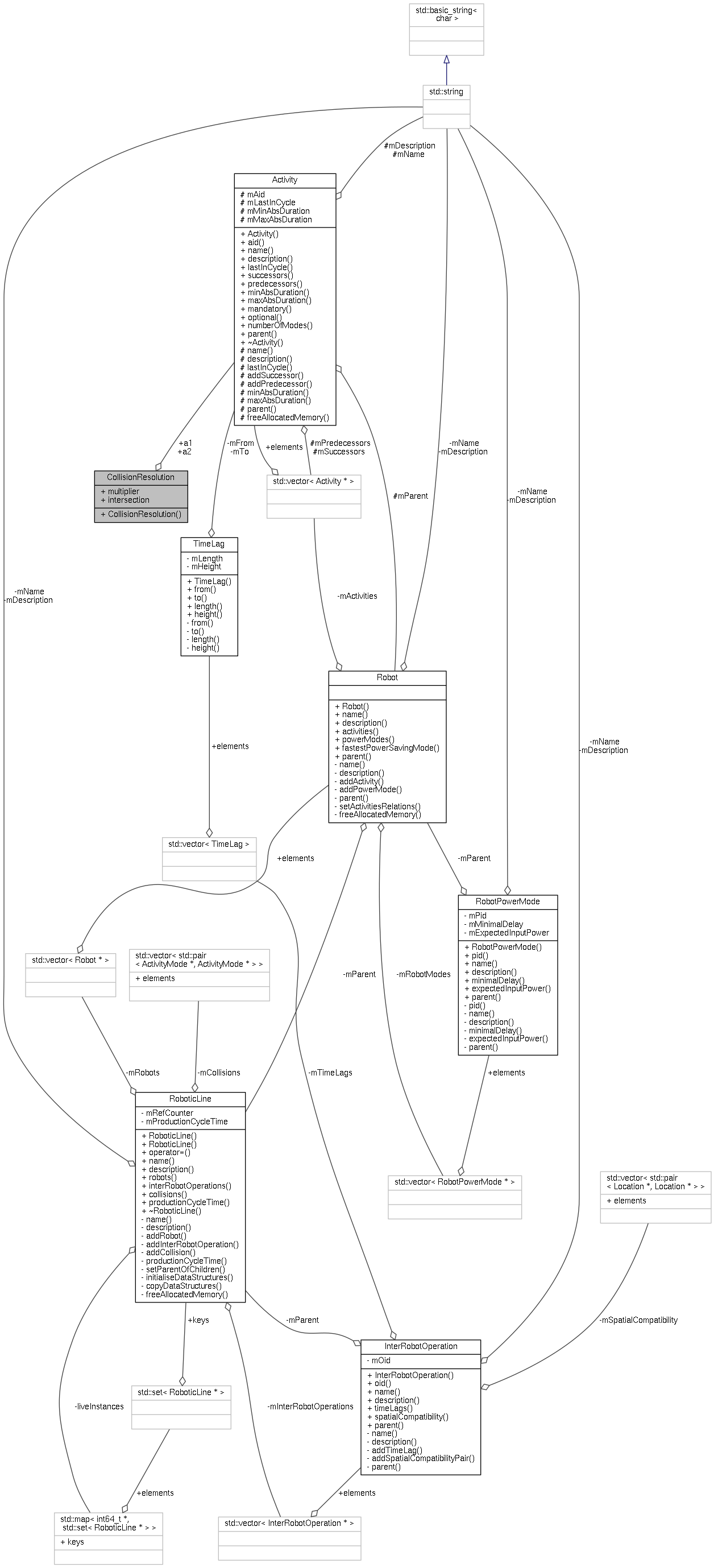
Public Member Functions | |
| CollisionResolution () | |
| Empty collision constructed – a1 and a2 are null pointers. | |
Public Attributes | |
| Activity * | a1 |
| First activity involved in the collision. | |
| Activity * | a2 |
| Second activity involved in the collision. | |
| int32_t | multiplier |
| Multiplier addressing the time shift in the number of cycles. | |
| double | intersection |
| Duration of the collision between activities a1 and a2. | |
Detailed Description
The structure stores how to resolve one collision between robots.
Definition at line 172 of file DataStructures.h.
The documentation for this struct was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/HeuristicSolver/DataStructures.h
