Determines an optimal timing of a partially fixed problem. More...
#include <RoboticLineSolverLP.h>
 Collaboration diagram for RoboticLineSolverLP:
Collaboration diagram for RoboticLineSolverLP: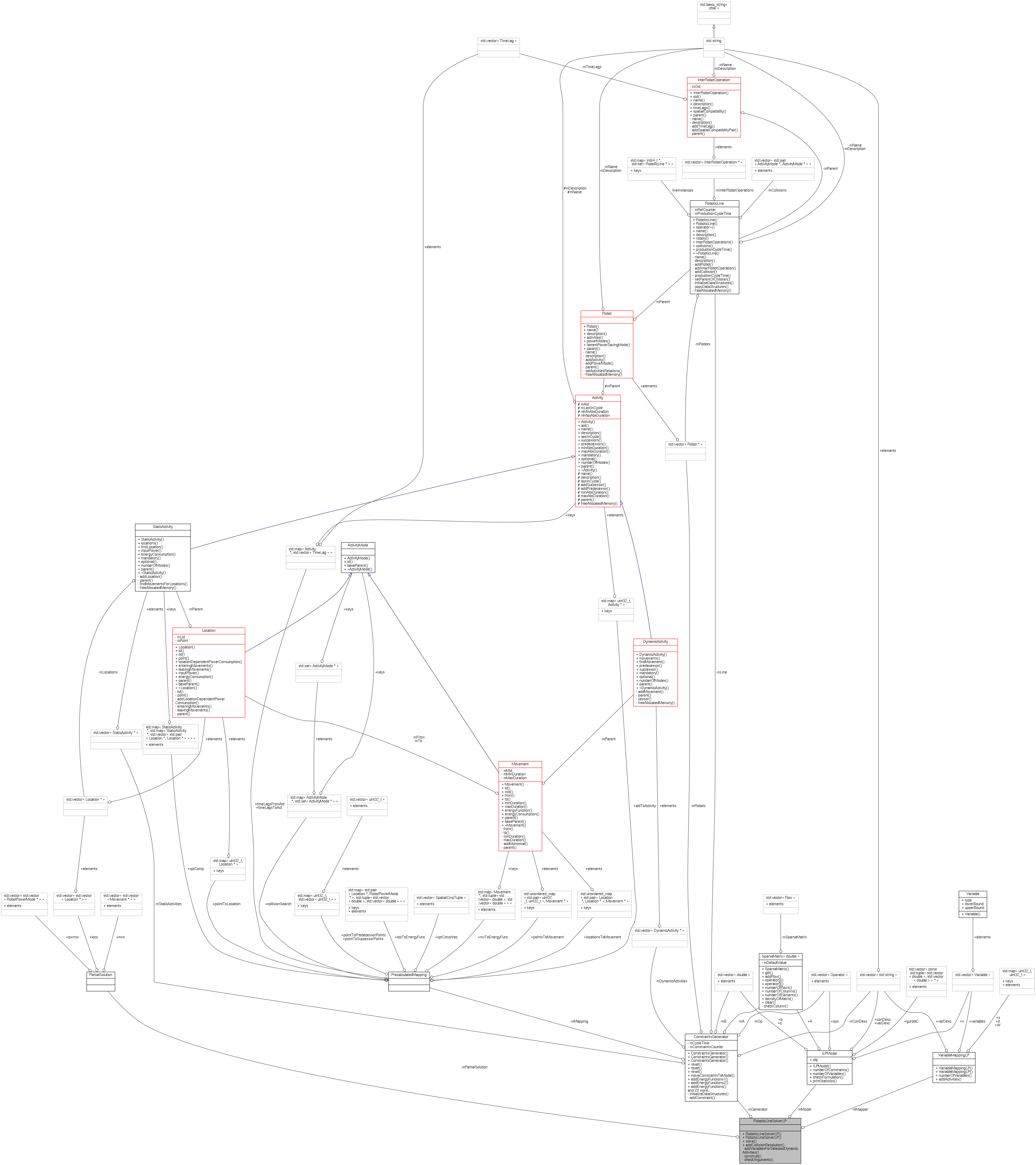
Public Member Functions | |
| RoboticLineSolverLP (Robot *r, const PartialSolution &ps, const PrecalculatedMapping &m) | |
| It builds a Linear Programming problem (variables, constraints, criterion) to be solved. More... | |
| RoboticLineSolverLP (const RoboticLine &l, const PartialSolution &ps, const PrecalculatedMapping &m) | |
| It builds a Linear Programming problem (variables, constraints, criterion) to be solved. More... | |
| Solution | solve () const |
| The energy optimal timing is determined by solving Linear Programming problem and the solution is returned. | |
| void | addCollisionResolution (Activity *i, Activity *j, const int32_t &multipleOfCycleTime) |
It adds a constraint  to resolve a collision where to resolve a collision where  and and  are start time and duration of the activity are start time and duration of the activity  , respectively, and , respectively, and  is the robot cycle time. More... is the robot cycle time. More... | |
Private Member Functions | |
| void | addVariablesForSelectedDynamicActivities () |
| It adds additional float variables for optional activities. | |
| void | construct (const PrecalculatedMapping &m, bool addTimeLags=true) |
| Complete construction of the Linear Programming problem for the energy optimization. More... | |
| void | checkArguments (const PrecalculatedMapping &m, const uint32_t &numberOfRobots=1u) const |
| It checks that the arguments passed to the constructor are valid and correct. More... | |
Private Attributes | |
| ILPModel | mModel |
| Linear Programming problem to be solved. | |
| VariableMappingLP | mMapper |
| Mapping of the continuous variables. | |
| ConstraintsGenerator | mGenerator |
| Generator of the constraints. | |
| PartialSolution | mPartialSolution |
| Partially fixed problem, or in other words, a partial solution. | |
Detailed Description
Determines an optimal timing of a partially fixed problem.
Linear Programming solver that determines an optimal timing of a partially fixed problem. It is used by the parallel heuristic, see ParallelHeuristicSolver, that evaluates lots of partially fixed problems to find high quality solutions in terms of energy consumption.
Definition at line 58 of file RoboticLineSolverLP.h.
Constructor & Destructor Documentation
| RoboticLineSolverLP::RoboticLineSolverLP | ( | Robot * | r, |
| const PartialSolution & | ps, | ||
| const PrecalculatedMapping & | m | ||
| ) |
It builds a Linear Programming problem (variables, constraints, criterion) to be solved.
- Parameters
-
r Robot for which the timing should be evaluated. ps Partially fixed problem, i.e. selected locations, modes, and movements. m Fast mapping for the searching in the data structure of the robotic cell (containing one robot).
Definition at line 32 of file RoboticLineSolverLP.cpp.
| RoboticLineSolverLP::RoboticLineSolverLP | ( | const RoboticLine & | l, |
| const PartialSolution & | ps, | ||
| const PrecalculatedMapping & | m | ||
| ) |
It builds a Linear Programming problem (variables, constraints, criterion) to be solved.
- Parameters
-
l Robotic cell for which the timing should be evaluated. ps Partially fixed problem, i.e. selected locations, modes, and movements. m Fast mapping for the searching in the data structure of the robotic cell.
Definition at line 40 of file RoboticLineSolverLP.cpp.
Member Function Documentation
| void RoboticLineSolverLP::addCollisionResolution | ( | Activity * | i, |
| Activity * | j, | ||
| const int32_t & | multipleOfCycleTime | ||
| ) |
It adds a constraint to resolve a collision where and are start time and duration of the activity , respectively, and is the robot cycle time.
- Parameters
-
i,j First and second considered activity, respectively. multipleOfCycleTime Multiple of the robot cycle time.
Definition at line 99 of file RoboticLineSolverLP.cpp.
|
private |
It checks that the arguments passed to the constructor are valid and correct.
- Parameters
-
m Fast mapping for the searching in the data structure of the robotic cell. numberOfRobots Number of robots considered in the problem.
- Note
- It is only called in the debug mode due to the performance issues.
Definition at line 216 of file RoboticLineSolverLP.cpp.
|
private |
Complete construction of the Linear Programming problem for the energy optimization.
- Parameters
-
m Fast mapping for the searching in the data structure of the robotic cell. addTimeLags Whether time lags should be considered, i.e. a robotic cell with more than one robot.
- Note
- Gurobi convex functions can be employed to accelerate the solution process.
Definition at line 122 of file RoboticLineSolverLP.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/ILPSolver/RoboticLineSolverLP.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/ILPSolver/RoboticLineSolverLP.cpp
