The structure contains the maps for fast searching in the robotic cell. More...
#include <PrecalculatedMapping.h>
 Collaboration diagram for PrecalculatedMapping:
Collaboration diagram for PrecalculatedMapping: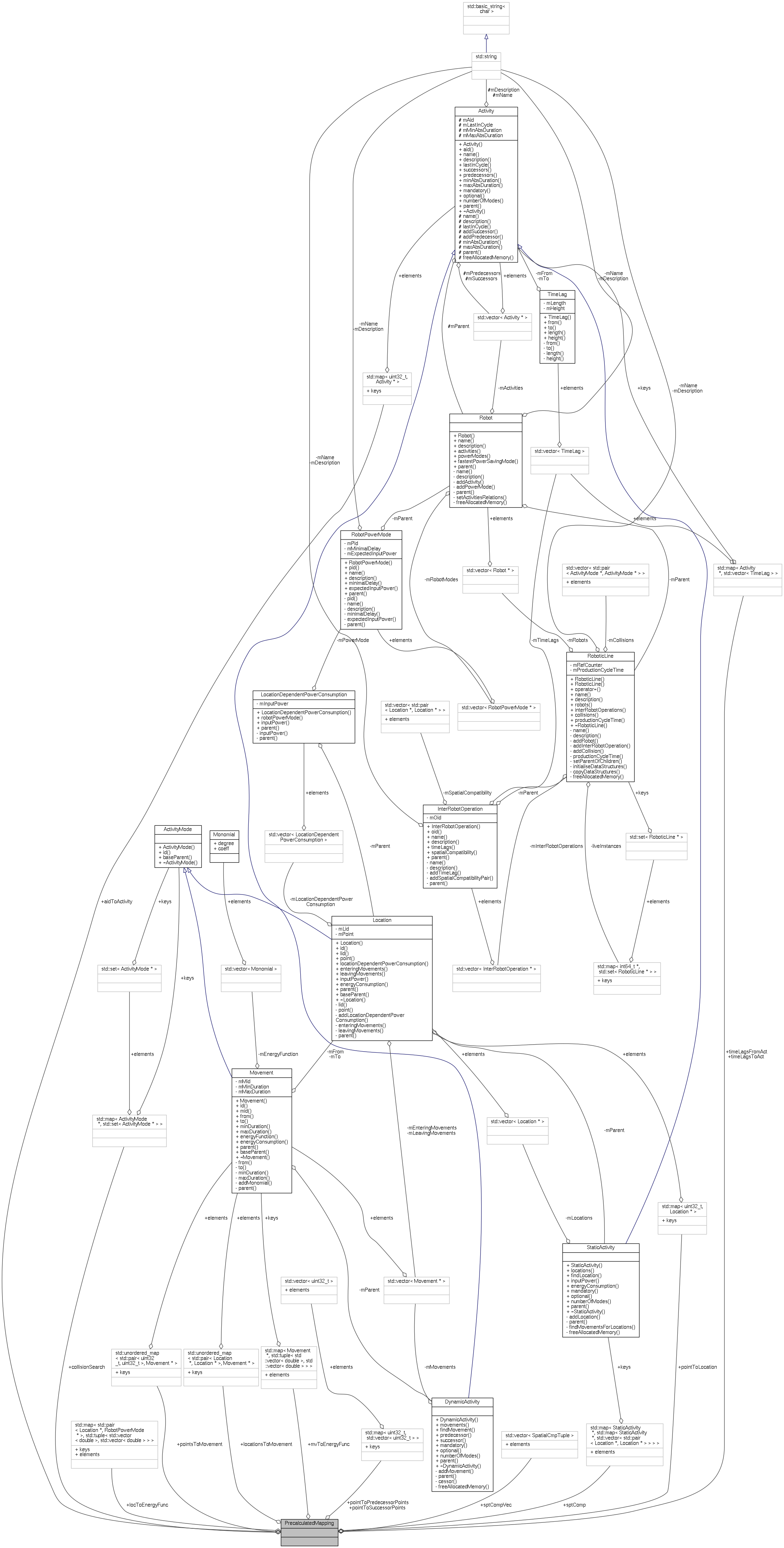
Public Attributes | |
| std::map< uint32_t, Activity * > | aidToActivity |
| Activity identification to its pointer. | |
| std::map< uint32_t, Location * > | pointToLocation |
| Unique coordinate, i.e. a point, to the related location. | |
| std::unordered_map< std::pair< uint32_t, uint32_t >, Movement * > | pointsToMovement |
| Two coordinates are mapped to the movement starting/ending at the first/second coordinate, respectively. | |
| std::unordered_map< std::pair< Location *, Location * >, Movement * > | locationsToMovement |
| It finds the movement between two locations if exists. | |
| std::map< uint32_t, std::vector< uint32_t > > | pointToPredecessorPoints |
| It finds all the starting coordinates of the movements entering the given coordinate, i.e. the point. | |
| std::map< uint32_t, std::vector< uint32_t > > | pointToSuccessorPoints |
| It finds all the ending coordinates of the movements leaving the given coordinate, i.e. the point. | |
| std::map< StaticActivity *, std::map< StaticActivity *, std::vector< std::pair< Location *, Location * > > > > | sptComp |
| Two-step mapping taking two static activities and returning a list of compatible pairs of locations. | |
| std::vector< SpatialCmpTuple > | sptCompVec |
| Enables to fast iterate through spatial compatibility elements. More... | |
| std::map< Movement *, std::tuple< std::vector< double >, std::vector< double > > > | mvToEnergyFunc |
| It takes a pointer to a movement and returns the vector of precalculated coordinates corresponding to a piece-wise linearized energy function. | |
| std::map< std::pair< Location *, RobotPowerMode * >, std::tuple< std::vector< double >, std::vector< double > > > | locToEnergyFunc |
| Location and the selected power saving mode are mapped to the linear energy function, i.e. the size of each vector in the tuple is 2. | |
| std::map< ActivityMode *, std::set< ActivityMode * > > | collisionSearch |
| It finds colliding movements and locations for a given location or movement. | |
| std::map< Activity *, std::vector< TimeLag > > | timeLagsFromAct |
| It searches for all the time lags starting from the given activity. | |
| std::map< Activity *, std::vector< TimeLag > > | timeLagsToAct |
| It searches for all the time lags ending in the given activity. | |
Detailed Description
The structure contains the maps for fast searching in the robotic cell.
The structure consists of various (unordered) maps and the vector for fast access to elements of the spatial compatibility. The main goal of the maps is to provide fast access based on keys, i.e. unique identifiers like e.g. location ID, point, pointer values, etc. As the mapped values are mostly pointers, it allows to immediately explore the related data-structure and close parts of the robotic cell.
Definition at line 76 of file PrecalculatedMapping.h.
Member Data Documentation
| std::vector<SpatialCmpTuple> PrecalculatedMapping::sptCompVec |
Enables to fast iterate through spatial compatibility elements.
- See also
- SpatialCmpTuple
Definition at line 92 of file PrecalculatedMapping.h.
The documentation for this struct was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/Shared/PrecalculatedMapping.h
