The structures and methods suitable for fast searching in the data structure of the robotic cell. More...
#include <map>#include <set>#include <vector>#include <utility>#include <unordered_map>#include "RoboticLine.h"#include "Shared/Utils.h"#include "Solution/Solution.h" Include dependency graph for PrecalculatedMapping.h:
Include dependency graph for PrecalculatedMapping.h: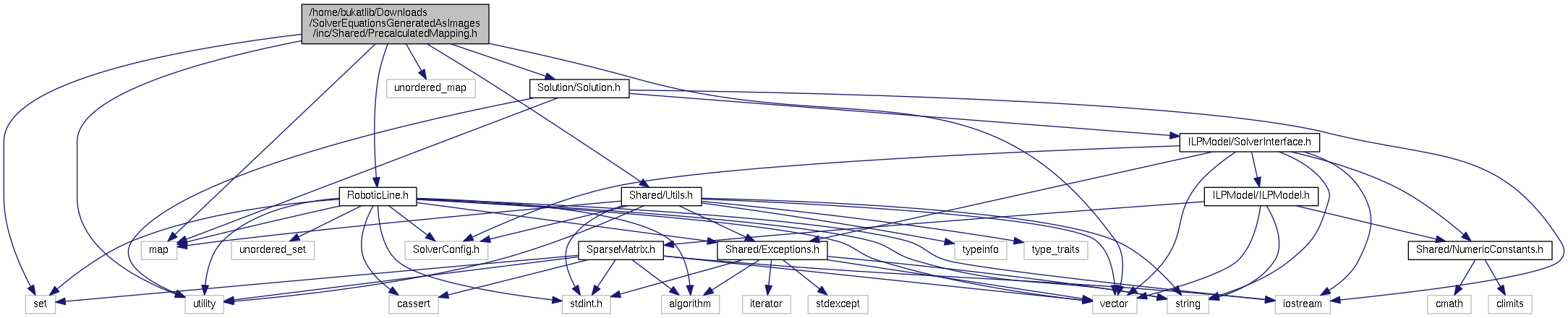 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: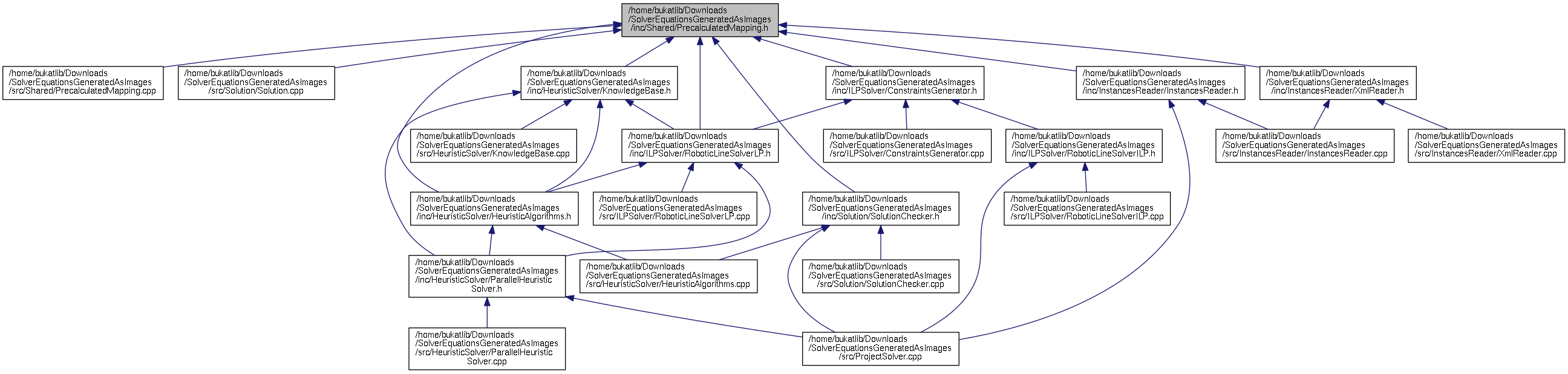
Go to the source code of this file.
Classes | |
| struct | std::hash< pair< uint32_t, uint32_t > > |
| Template specialization of the hash for a pair of uint32_t. More... | |
| struct | std::hash< pair< Location *, Location * > > |
| Template specialization of the hash for a pair of Location pointers. More... | |
| struct | PrecalculatedMapping |
| The structure contains the maps for fast searching in the robotic cell. More... | |
Typedefs | |
| using | SpatialCmpTuple = std::tuple< uint32_t, uint32_t, StaticActivity *, StaticActivity *, std::vector< std::pair< Location *, Location * >>> |
| Defines the data type for an element of the spatial compatibility, i.e. (rob1 idx, rob2 idx, act1, act2, {{loc1, loc2}*}). | |
Functions | |
| Movement * | getSelectedMovement (const Solution &s, const PrecalculatedMapping &m, DynamicActivity *da) |
| It extracts the selected movement of the given dynamic activity from the solution. More... | |
| template<class X , class Y > | |
| std::vector< Movement * > | findMovements (X from, Y to) |
| It finds all the movements located between from and to and returns them in the vector. More... | |
Detailed Description
The structures and methods suitable for fast searching in the data structure of the robotic cell.
Definition in file PrecalculatedMapping.h.
Function Documentation
template<class X , class Y >
| std::vector<Movement*> findMovements | ( | X | from, |
| Y | to | ||
| ) |
It finds all the movements located between from and to and returns them in the vector.
- Parameters
-
from Specifies starting location/activity. to Specifies ending location/activity.
- Template Parameters
-
X,Y Each of them is either a pointer to location or static activity.
- Returns
- Movements between from and to.
Definition at line 45 of file PrecalculatedMapping.cpp.
| Movement* getSelectedMovement | ( | const Solution & | s, |
| const PrecalculatedMapping & | m, | ||
| DynamicActivity * | da | ||
| ) |
It extracts the selected movement of the given dynamic activity from the solution.
- Parameters
-
s Solution of the energy optimization problem. m Mapping calculated for the related robotic cell. da A dynamic activity located in the robotic cell.
- Returns
- Movement of the dynamic activity that was selected in the solution.
Definition at line 26 of file PrecalculatedMapping.cpp.
