Fixed locations, power saving modes, and movements. More...
#include <RoboticLineSolverLP.h>
 Collaboration diagram for PartialSolution:
Collaboration diagram for PartialSolution: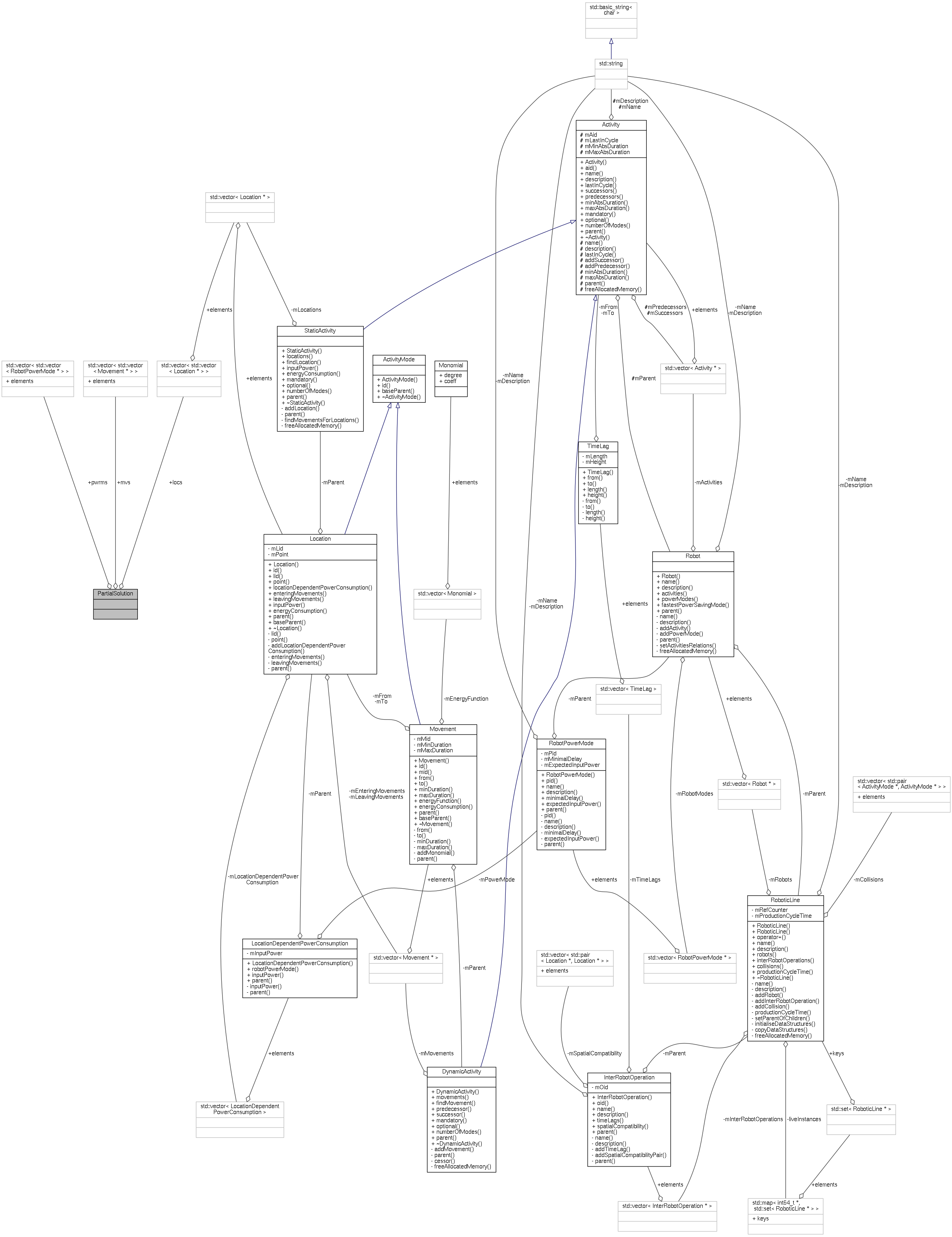
Public Attributes | |
| std::vector< std::vector< Location * > > | locs |
| Selected locations for each robot, time ordered. | |
| std::vector< std::vector< RobotPowerMode * > > | pwrms |
| Selected power saving modes of related locations. | |
| std::vector< std::vector< Movement * > > | mvs |
| Selected movements, implied from the selected locations and their order. | |
Detailed Description
Fixed locations, power saving modes, and movements.
The parallel heuristic ParallelHeuristicSolver evaluates lots of partially fixed problems where locations, power saving modes, and movements have been preselected by the heuristic.
- Note
- The spatial compatibility is resolved externally by an appropriate selection of locations.
Definition at line 43 of file RoboticLineSolverLP.h.
The documentation for this struct was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/ILPSolver/RoboticLineSolverLP.h
