Records a potential energy impact if a power saving mode of a robot is switched to another one. More...
#include <DataStructures.h>
 Collaboration diagram for ModeSwitchInfo:
Collaboration diagram for ModeSwitchInfo: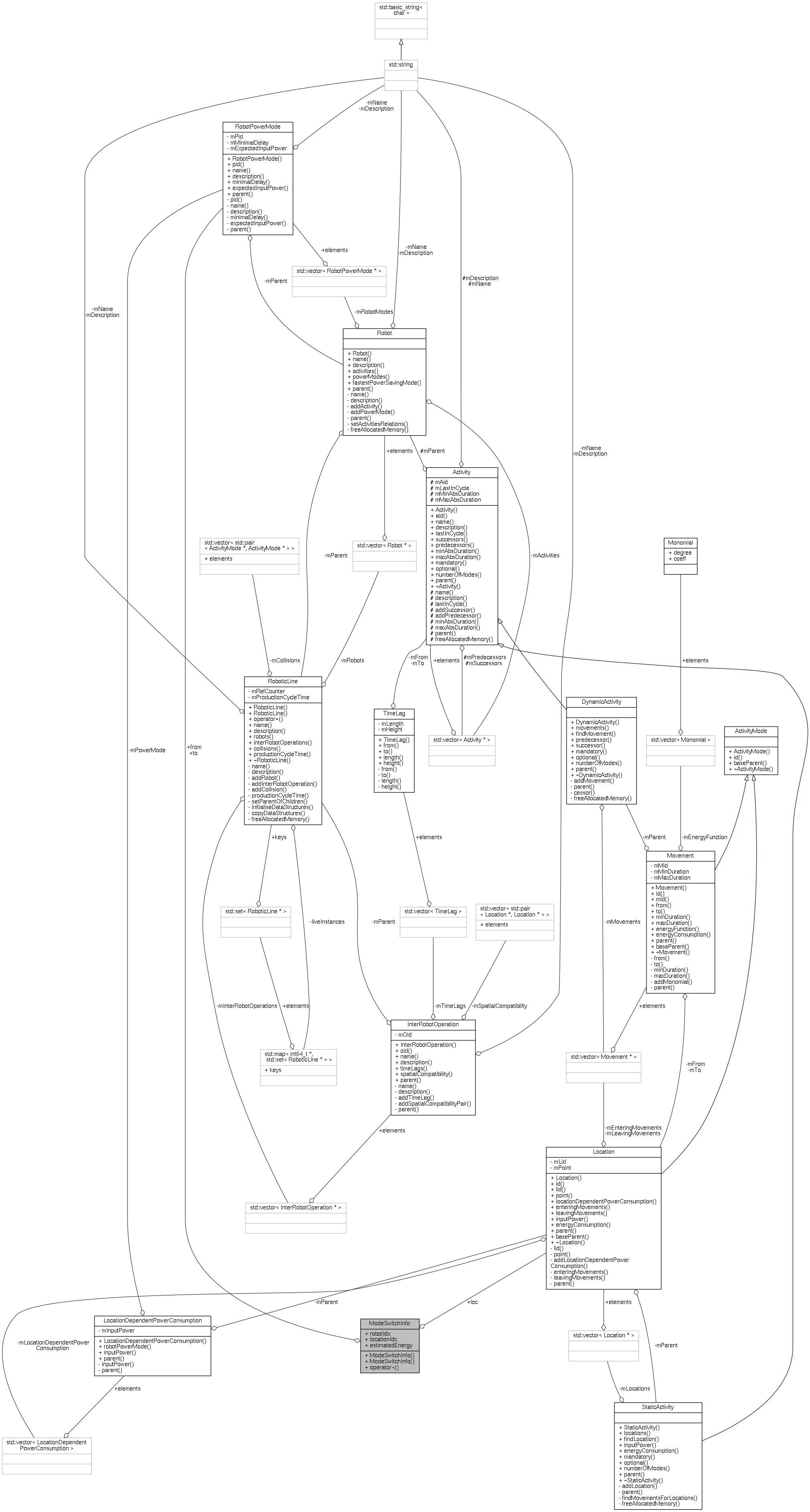
Public Member Functions | |
| ModeSwitchInfo (uint32_t r, uint32_t l, Location *relLoc, RobotPowerMode *f, RobotPowerMode *t, double ee) | |
| bool | operator< (const ModeSwitchInfo &msi) const |
| Sorting the switching alternatives according to the estimated energy consumption (less is better). | |
Public Attributes | |
| uint32_t | robotIdx |
| Index of the robot. | |
| uint32_t | locationIdx |
| Index of the related location of the robot. | |
| Location * | loc |
| A pointer to the considered location. | |
| RobotPowerMode * | from |
| The original power saving mode. | |
| RobotPowerMode * | to |
| The candidate power saving mode to switch to. | |
| double | estimatedEnergy |
| Estimated energy consumption after switching to the candidate power saving mode. | |
Detailed Description
Records a potential energy impact if a power saving mode of a robot is switched to another one.
Definition at line 191 of file DataStructures.h.
The documentation for this struct was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/HeuristicSolver/DataStructures.h
