It writes problem instances to the xml file. More...
#include <XmlWriter.h>
 Collaboration diagram for XmlWriter:
Collaboration diagram for XmlWriter: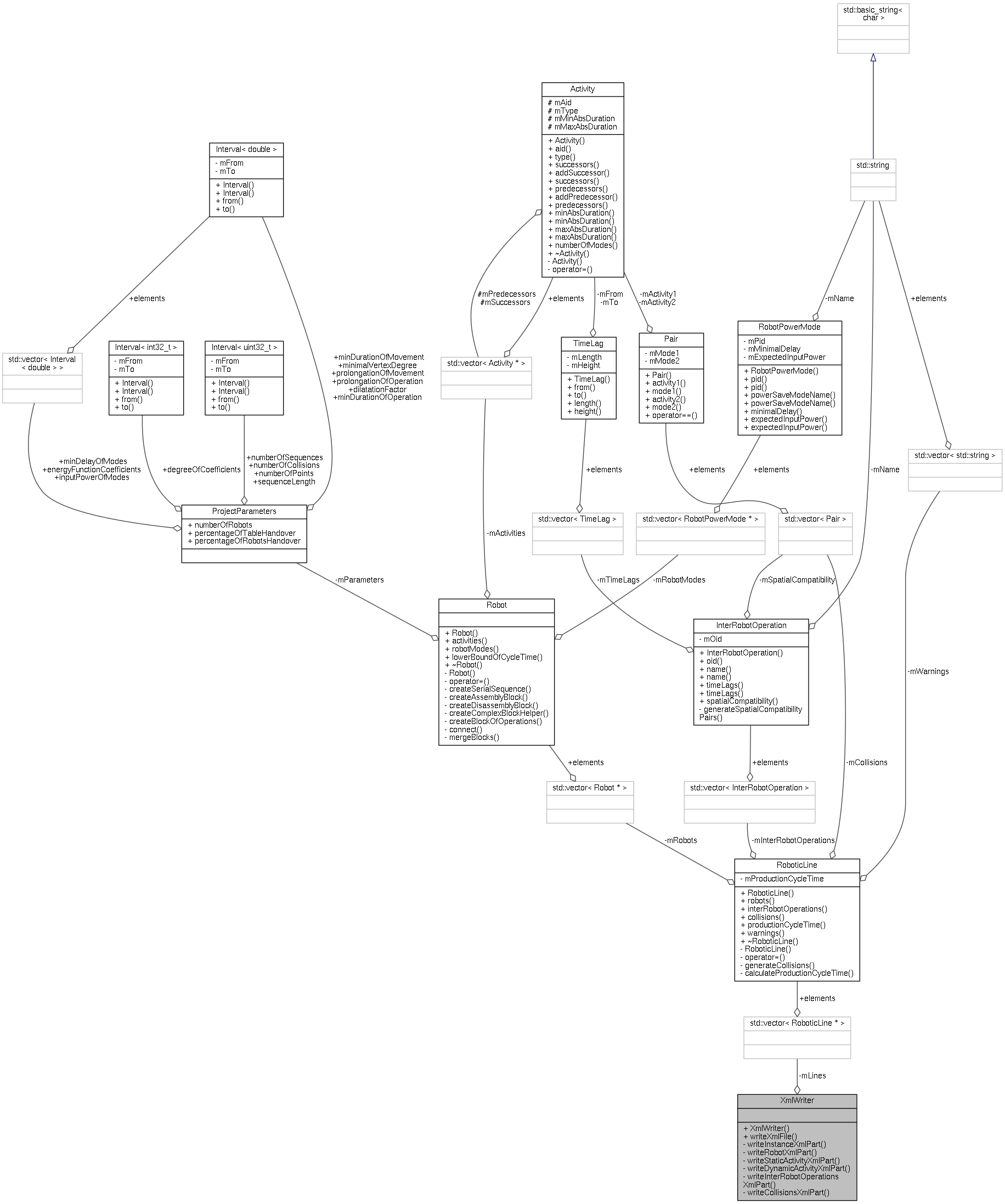
Public Member Functions | |
| XmlWriter (const std::vector< RoboticLine * > &lines) | |
| It initialises the XmlWriter instance by the given robotic cells. More... | |
| void | writeXmlFile (std::string filename=Settings::OUTPUT_FILE) |
| It transforms the instances of the robotic cells to the form of the xml file. More... | |
Private Member Functions | |
| void | writeInstanceXmlPart (std::ostream &out, RoboticLine *line, const uint32_t &lineId, uint32_t length) |
| It writes a part of the xml file corresponding to one robotic cell. More... | |
| void | writeRobotXmlPart (std::ostream &out, Robot *robot, const uint32_t &robotId, uint32_t length) |
| It writes a part of the xml file corresponding to one robot. More... | |
| void | writeStaticActivityXmlPart (std::ostream &out, StaticActivity *a, uint32_t length) |
| It writes a part of the xml file corresponding to one static activity. More... | |
| void | writeDynamicActivityXmlPart (std::ostream &out, DynamicActivity *a, uint32_t length) |
| It writes a part of the xml file corresponding to one dynamic activity. More... | |
| void | writeInterRobotOperationsXmlPart (std::ostream &out, RoboticLine *line, uint32_t length) |
| It writes a part of the xml file corresponding to the inter-robot operations. More... | |
| void | writeCollisionsXmlPart (std::ostream &out, RoboticLine *line, uint32_t length) |
| It writes a part of the xml file corresponding to the spatial collisions. More... | |
Private Attributes | |
| std::vector< RoboticLine * > | mLines |
| Robotic cells to be written to the xml file. | |
Detailed Description
It writes problem instances to the xml file.
Instance of XmlWriter class reads dataset of robotic cells and writes them in the form of a well-structured xml file.
Definition at line 55 of file XmlWriter.h.
Constructor & Destructor Documentation
|
inline |
It initialises the XmlWriter instance by the given robotic cells.
- Parameters
-
lines Robotic cells to be written to the xml file.
Definition at line 61 of file XmlWriter.h.
Member Function Documentation
|
private |
It writes a part of the xml file corresponding to the spatial collisions.
- Parameters
-
out Output stream to which the text stream will be written. line Spatial collisions of this robotic cell will be transformed to the text stream. length Initial indentation for each new line in this xml part.
Definition at line 221 of file XmlWriter.cpp.
|
private |
It writes a part of the xml file corresponding to one dynamic activity.
- Parameters
-
out Output stream to which the text stream will be written. a The dynamic activity to be transformed to the text stream. length Initial indentation for each new line in this xml part.
Definition at line 150 of file XmlWriter.cpp.
|
private |
It writes a part of the xml file corresponding to one robotic cell.
- Parameters
-
out Output stream to which the text stream will be written. line Robotic cell to be transformed to the text stream. lineId Identification of the robotic cell according to the order. length Initial indentation for each new line in this xml part.
Definition at line 63 of file XmlWriter.cpp.
|
private |
It writes a part of the xml file corresponding to the inter-robot operations.
- Parameters
-
out Output stream to which the text stream will be written. line Inter-robot operations of this robotic cell will be transformed to the text stream. length Initial indentation for each new line in this xml part.
Definition at line 184 of file XmlWriter.cpp.
|
private |
It writes a part of the xml file corresponding to one robot.
- Parameters
-
out Output stream to which the text stream will be written. robot The robot to be transformed to the text stream. robotId Integer identification of the robot. length Initial indentation for each new line in this xml part.
Definition at line 81 of file XmlWriter.cpp.
|
private |
It writes a part of the xml file corresponding to one static activity.
- Parameters
-
out Output stream to which the text stream will be written. a The static activity to be transformed to the text stream. length Initial indentation for each new line in this xml part.
Definition at line 124 of file XmlWriter.cpp.
| void XmlWriter::writeXmlFile | ( | std::string | filename = Settings::OUTPUT_FILE | ) |
It transforms the instances of the robotic cells to the form of the xml file.
- Parameters
-
filename The filename of the output xml file.
Definition at line 31 of file XmlWriter.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/inc/XmlWriter.h
- /home/bukatlib/Downloads/GeneratorEquationsAsImages/src/XmlWriter.cpp
