Structure encapsulates the time and energy properties of an activity with its selected mode (a movement or location). More...
#include <DataStructures.h>
 Collaboration diagram for ActivityModeInfo:
Collaboration diagram for ActivityModeInfo: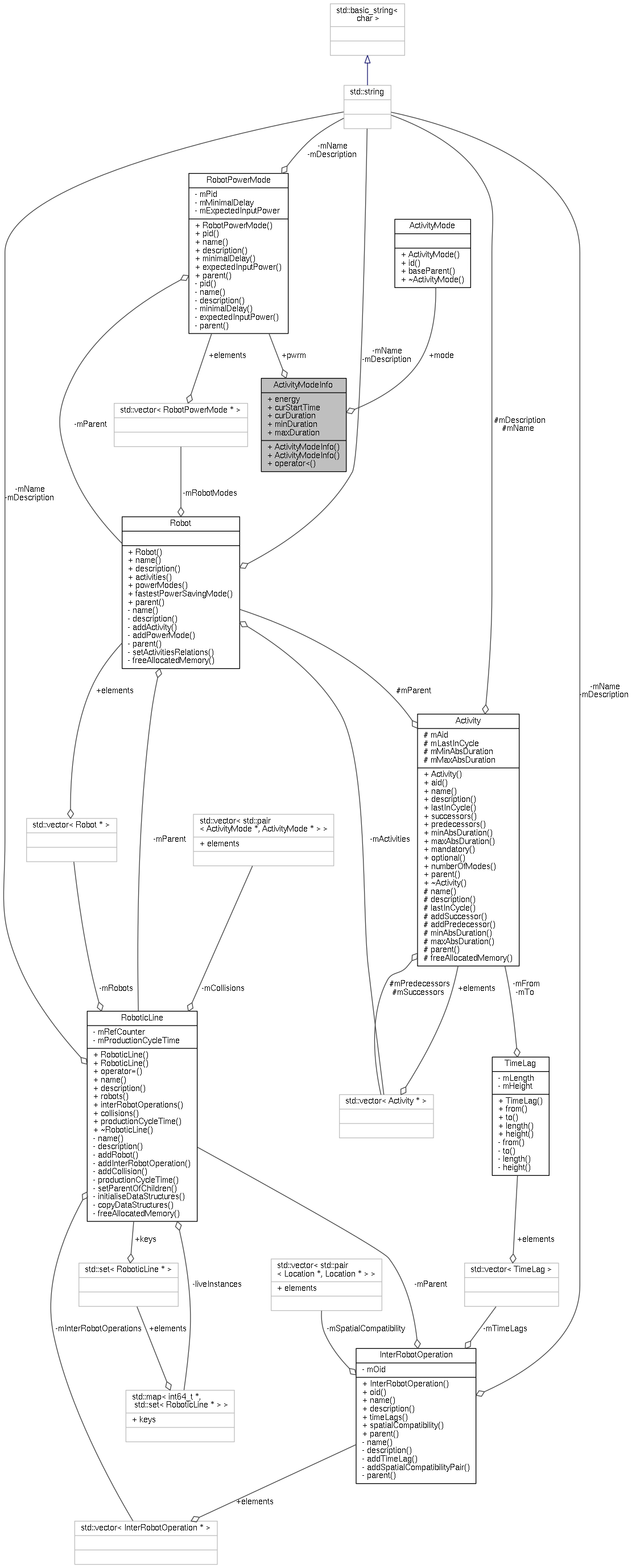
Public Member Functions | |
| ActivityModeInfo (ActivityMode *m, double s, double d) | |
| ActivityModeInfo (ActivityMode *m, RobotPowerMode *pm, double e, double s, double d, double minDur, double maxDur) | |
| bool | operator< (const ActivityModeInfo &ami) const |
| Sort the activities according to start time, left to right direction in the Gantt. | |
Public Attributes | |
| ActivityMode * | mode |
| Selected mode of an activity, i.e. movement or location. | |
| RobotPowerMode * | pwrm |
| Power saving mode of the robot if it applies, i.e. mode can be cast to Location. | |
| double | energy |
| Energy required by the activity for the current duration. | |
| double | curStartTime |
| Current start time of the activity. | |
| double | curDuration |
| Current duration of the activity. | |
| double | minDuration |
| Minimal possible duration of the activity for the given mode, robot, and power saving mode (if mode ~ location). | |
| double | maxDuration |
| Maximal possible duration of the activity limited by e.g. the robot, performed operation, etc. | |
Detailed Description
Structure encapsulates the time and energy properties of an activity with its selected mode (a movement or location).
- See also
- HeuristicAlgorithms::heuristicPowerModeSelection, HeuristicAlgorithms::scaleGanttToCycleTime
Definition at line 219 of file DataStructures.h.
The documentation for this struct was generated from the following file:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/HeuristicSolver/DataStructures.h
