The class is intended to be used by users for the dataset parsing and checking. More...
#include <InstancesReader.h>
 Collaboration diagram for InstancesReader:
Collaboration diagram for InstancesReader: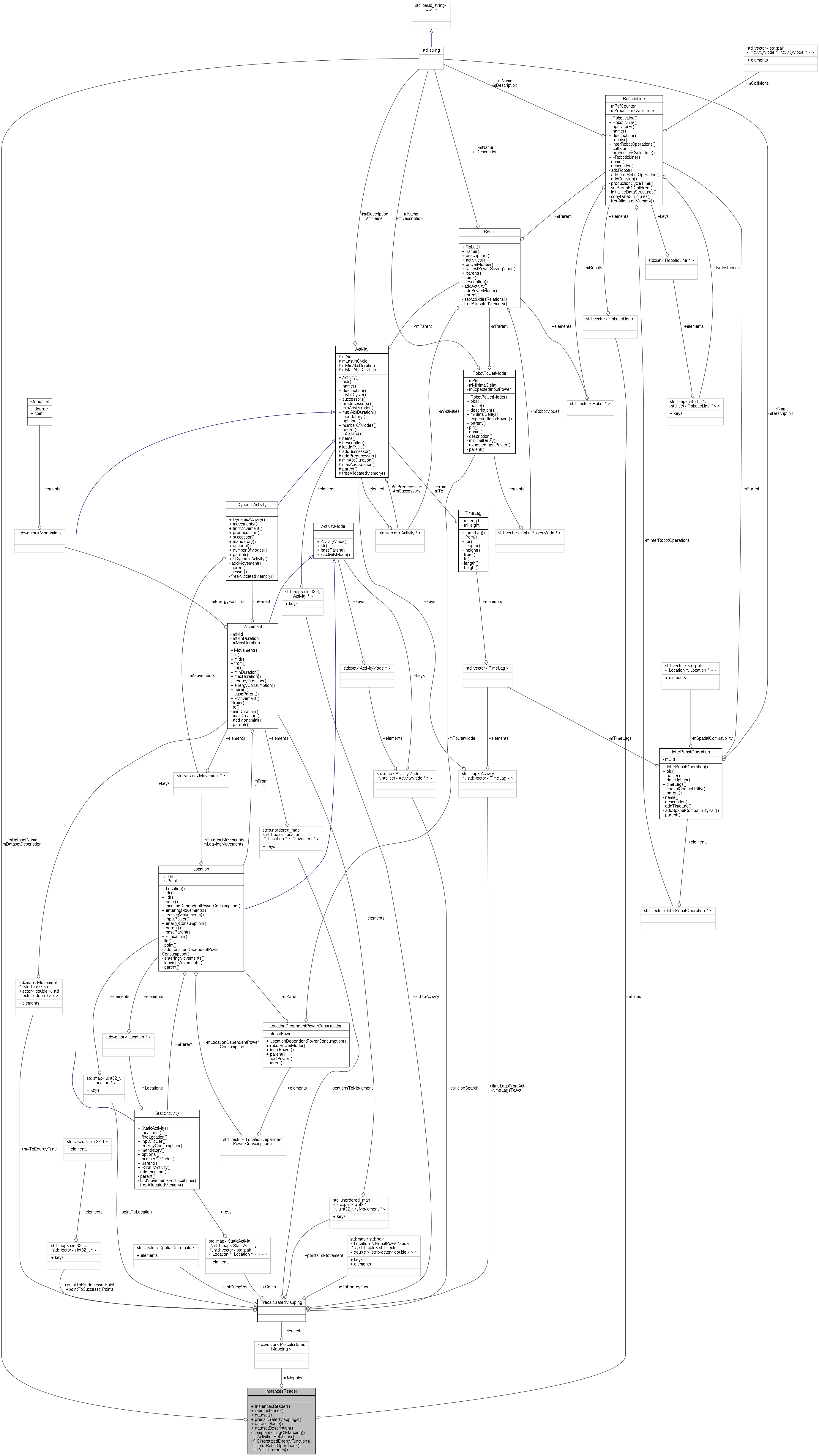
Public Member Functions | |
| void | readInstances () |
| It processes the dataset specified in Settings::DATASET_FILE. | |
| std::vector< RoboticLine > | dataset () const |
| std::vector< PrecalculatedMapping > | precalculatedMappings () const |
| std::string | datasetName () const |
| std::string | datasetDescription () const |
Private Member Functions | |
| void | completeFillingOfMapping () |
| A wrapper method calling all the related filling methods. | |
| void | fillActivitiesRelations (PrecalculatedMapping &mapping, const RoboticLine &line) |
| Maps related to activities relations (precedences) are filled. More... | |
| void | fillDiscretizedEnergyFunctions (PrecalculatedMapping &mapping, const RoboticLine &line) |
| Energy functions are piece-wise linearized, and vectors of coordinates are written to the mapping. More... | |
| void | fillInterRobotOperations (PrecalculatedMapping &mapping, const RoboticLine &line) |
| It fills the searching maps related to the robot synchronizations and spatial compatibility. More... | |
| void | fillCollisionZones (PrecalculatedMapping &mapping, const RoboticLine &line) |
| It fills the maps for fast searching of colliding movements or locations. More... | |
Private Attributes | |
| std::vector< RoboticLine > | mLines |
| Robotic cells read from the dataset. | |
| std::vector< PrecalculatedMapping > | mMapping |
| Precalculated mappings suitable for fast searching in the data structures of robotic cells. | |
| std::string | mDatasetName |
| Name of the dataset. | |
| std::string | mDatasetDescription |
| Description of the dataset. | |
Detailed Description
The class is intended to be used by users for the dataset parsing and checking.
An instance of the InstancesReader class is responsible for the full process of the dataset processing, i.e. parsing, filling the data structures of robotic cells, checking the correctness of instances, and finally creating the mappings for fast searching by a key. However, a part of the work is carried out by XmlReader and InstanceChecker classes that help with XML parsing and instance checking, respectively.
- See also
- XmlReader, InstanceChecker
Definition at line 42 of file InstancesReader.h.
Member Function Documentation
|
private |
Maps related to activities relations (precedences) are filled.
- Parameters
-
mapping A reference to the structure with precalculated mappings and data. line Robotic cell for which the mapping will be updated.
Definition at line 59 of file InstancesReader.cpp.
|
private |
It fills the maps for fast searching of colliding movements or locations.
- Parameters
-
mapping A reference to the structure with precalculated mappings and data. line Robotic cell for which the mapping will be updated.
Definition at line 215 of file InstancesReader.cpp.
|
private |
Energy functions are piece-wise linearized, and vectors of coordinates are written to the mapping.
- Parameters
-
mapping A reference to the structure with precalculated mappings and data. line Robotic cell for which the mapping will be updated.
- Remarks
- The functions are piece-wise linearized in a smart way, it means that the function segments are not equidistant but their lengths are carefully selected with respect to the second derivations and function errors.
Definition at line 92 of file InstancesReader.cpp.
|
private |
It fills the searching maps related to the robot synchronizations and spatial compatibility.
- Parameters
-
mapping A reference to the structure with precalculated mappings and data. line Robotic cell for which the mapping will be updated.
Definition at line 155 of file InstancesReader.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/InstancesReader/InstancesReader.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/InstancesReader/InstancesReader.cpp
