An instance of this class checks a dataset instance. More...
#include <InstancesReader.h>
 Collaboration diagram for InstanceChecker:
Collaboration diagram for InstanceChecker: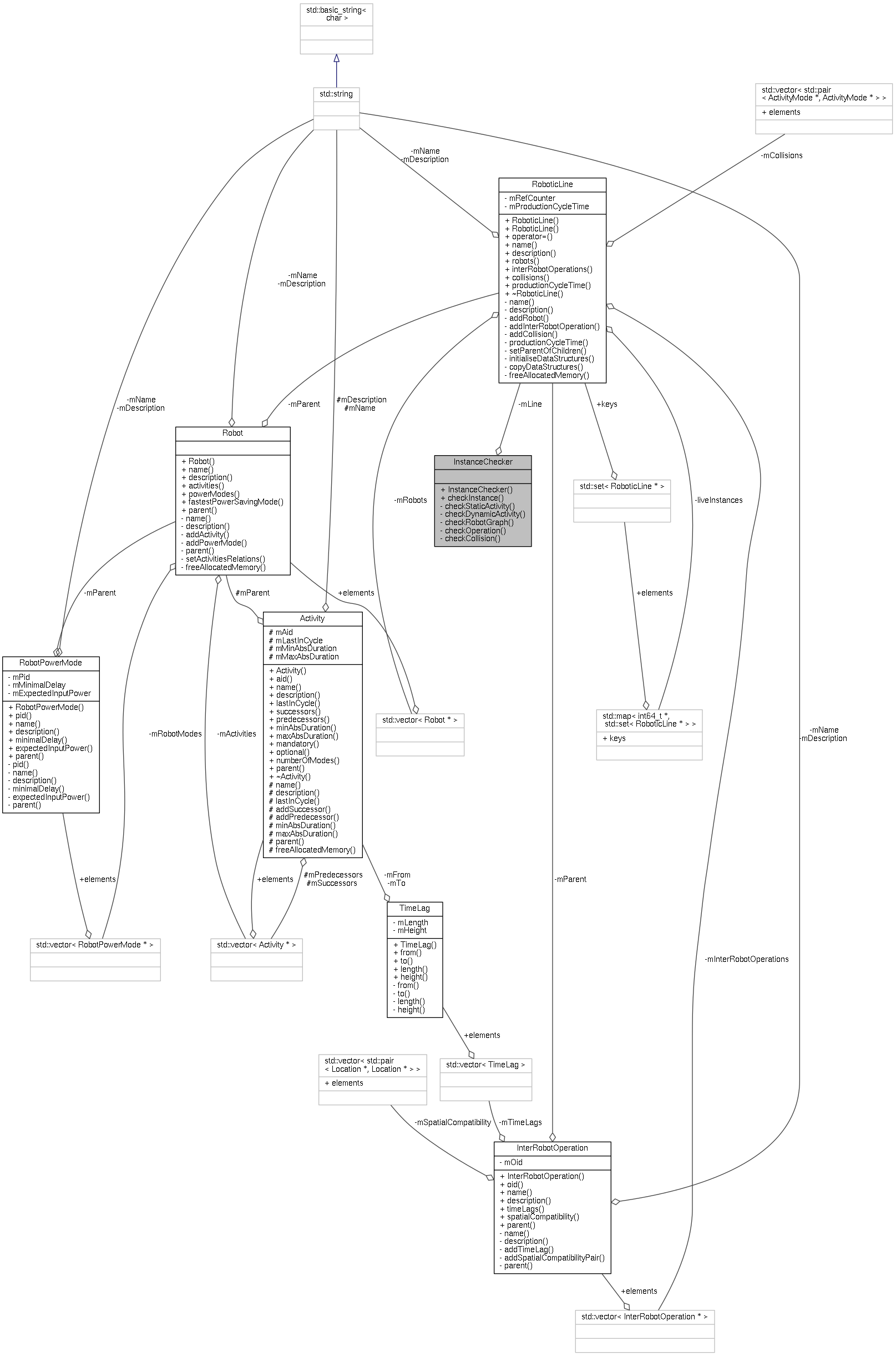
Public Member Functions | |
| InstanceChecker (const RoboticLine &line) | |
| Constructs an instance checker. More... | |
| void | checkInstance () const |
| The method verifies the correctness of the instance. If incorrect, then an exception is thrown. | |
Private Member Functions | |
| void | checkStaticActivity (StaticActivity *sa) const |
| It checks the activity duration and whether the input power of power saving modes is defined. More... | |
| void | checkDynamicActivity (DynamicActivity *da) const |
| Verifies the activity duration and convexity of energy functions. More... | |
| void | checkRobotGraph (Robot *r) const |
| It checks that there is a hamiltonian circuit in the robot graph. More... | |
| void | checkOperation (InterRobotOperation *op) const |
| Checks that each time lag or spatial compatibility pair is defined for two different robots. More... | |
| void | checkCollision (const std::pair< ActivityMode *, ActivityMode * > &col) const |
| Checks that the collision is defined for two different robots. More... | |
Private Attributes | |
| const RoboticLine & | mLine |
| A reference to a robotic cell that will be tested for inconsistencies. | |
Detailed Description
An instance of this class checks a dataset instance.
The purpose of this class is to carry out various checks of the instance, e.g. check durations, energy functions, precedence graphs, operations, and collisions.
Definition at line 96 of file InstancesReader.h.
Constructor & Destructor Documentation
|
inline |
Constructs an instance checker.
- Parameters
-
line A robotic cell to be checked.
Definition at line 102 of file InstancesReader.h.
Member Function Documentation
|
private |
Checks that the collision is defined for two different robots.
- Parameters
-
col Collision to be checked.
Definition at line 365 of file InstancesReader.cpp.
|
private |
Verifies the activity duration and convexity of energy functions.
- Parameters
-
da Dynamic activity to be verified.
Definition at line 276 of file InstancesReader.cpp.
|
private |
Checks that each time lag or spatial compatibility pair is defined for two different robots.
- Parameters
-
op Inter-robot operation to be verified.
Definition at line 341 of file InstancesReader.cpp.
|
private |
It checks that there is a hamiltonian circuit in the robot graph.
- Parameters
-
r Robot to be checked.
Definition at line 293 of file InstancesReader.cpp.
|
private |
It checks the activity duration and whether the input power of power saving modes is defined.
- Parameters
-
sa Static activity to be checked.
Definition at line 251 of file InstancesReader.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/InstancesReader/InstancesReader.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/InstancesReader/InstancesReader.cpp
