An instance of this class is devoted to the solution checking. More...
#include <SolutionChecker.h>
 Collaboration diagram for SolutionChecker:
Collaboration diagram for SolutionChecker: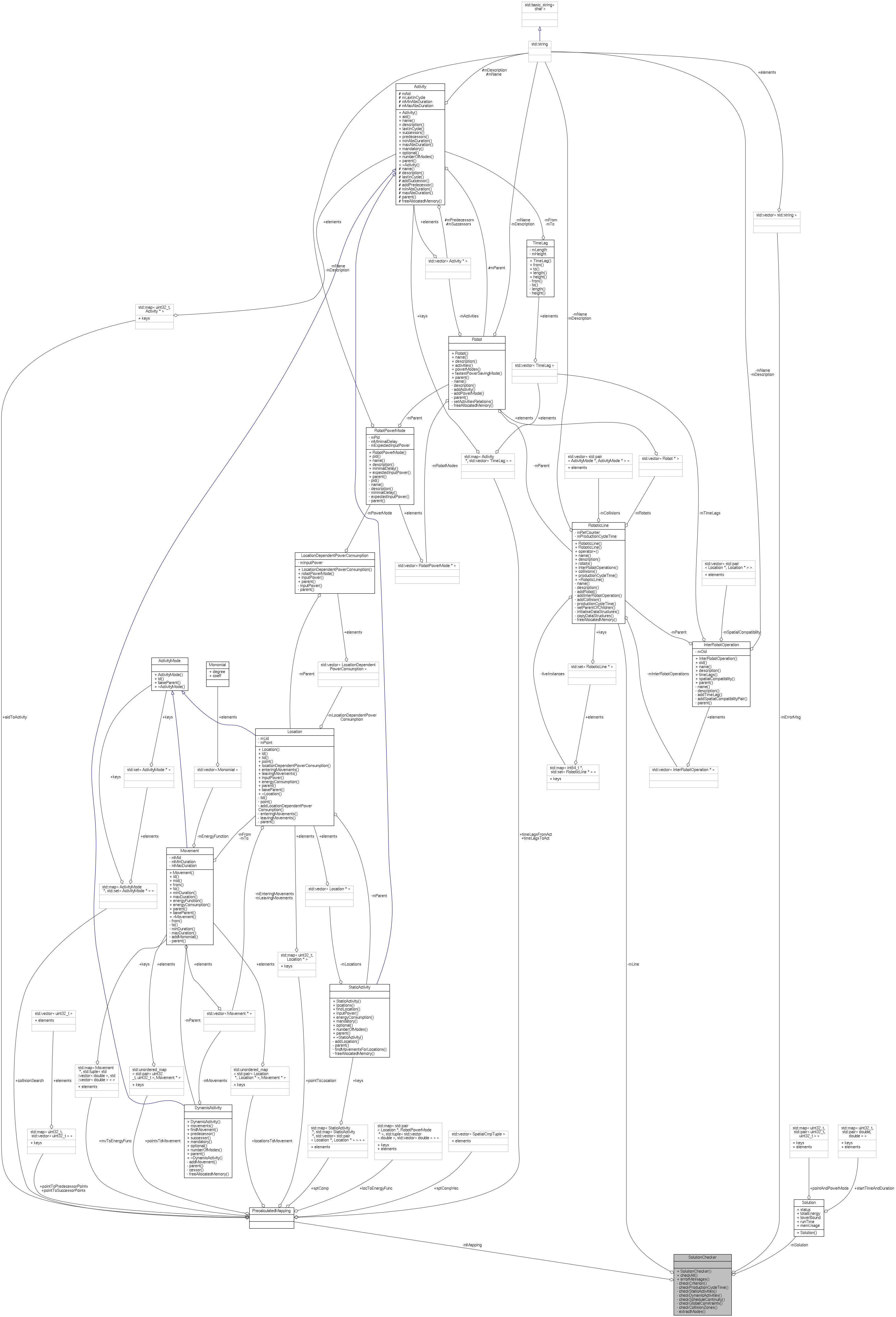
Public Member Functions | |
| SolutionChecker (const RoboticLine &l, const PrecalculatedMapping &m, const Solution &sol) | |
| Initialization of the solution checker. | |
| bool | checkAll () |
| It calls the private member methods to verify the solution. More... | |
| std::vector< std::string > | errorMessages () const |
| It returns error message(s) describing why the solution is invalid. | |
Private Member Functions | |
| void | checkCriterion () |
| Checks the calculation of the criterion. | |
| void | checkProductionCycleTime () |
| Checks whether the robot, i.e. production, cycle time is met. | |
| void | checkStaticActivities () |
| Checks durations of static activities. | |
| void | checkDynamicActivities () |
| Checks durations of dynamic activities. | |
| void | checkScheduleContinuity () |
| Checks whether each robot path is closed and hamiltonian (each static activity is visited just once). | |
| void | checkGlobalConstraints () |
| Verifies that time lags and spatial compatibility are not violated. | |
| void | checkCollisionZones () |
| Verifies that a collision does not occur in the solution. | |
| std::array< uint32_t, 2 > | extractModes (Activity *a1, Activity *a2) const |
| Auxiliary method that extracts selected modes (location/movement identifications) for activities a1 and a2, respectively. | |
Private Attributes | |
| RoboticLine | mLine |
| The data structure of the robotic cell for which the solution is verified. | |
| Solution | mSolution |
| The solution to be checked. | |
| PrecalculatedMapping | mMapping |
| Precalculated mapping constructed for the robotic cell. | |
| std::vector< std::string > | mErrorMsg |
| Error messages describing the reasons why the solution is invalid. | |
Detailed Description
An instance of this class is devoted to the solution checking.
SolutionChecker verifies whether a given solution is valid, or in other words, it checks whether the solution is feasible if it was declared to be feasible or optimal. It comprises verification of the time, spatial, and energy aspects.
- See also
- InstancesChecker
Definition at line 43 of file SolutionChecker.h.
Member Function Documentation
| bool SolutionChecker::checkAll | ( | ) |
It calls the private member methods to verify the solution.
- Returns
- True if the solution is valid, otherwise false.
- Note
- If false is returned then there is a high probability that a used optimization algorithm is flawed.
Definition at line 31 of file SolutionChecker.cpp.
The documentation for this class was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/Solution/SolutionChecker.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/Solution/SolutionChecker.cpp
