Mapping of continuous and binary variables. More...
#include <VariableMappingILP.h>
 Inheritance diagram for VariableMappingILP:
Inheritance diagram for VariableMappingILP: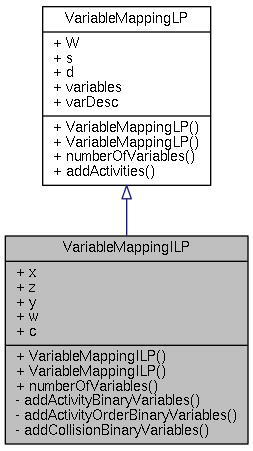 Collaboration diagram for VariableMappingILP:
Collaboration diagram for VariableMappingILP: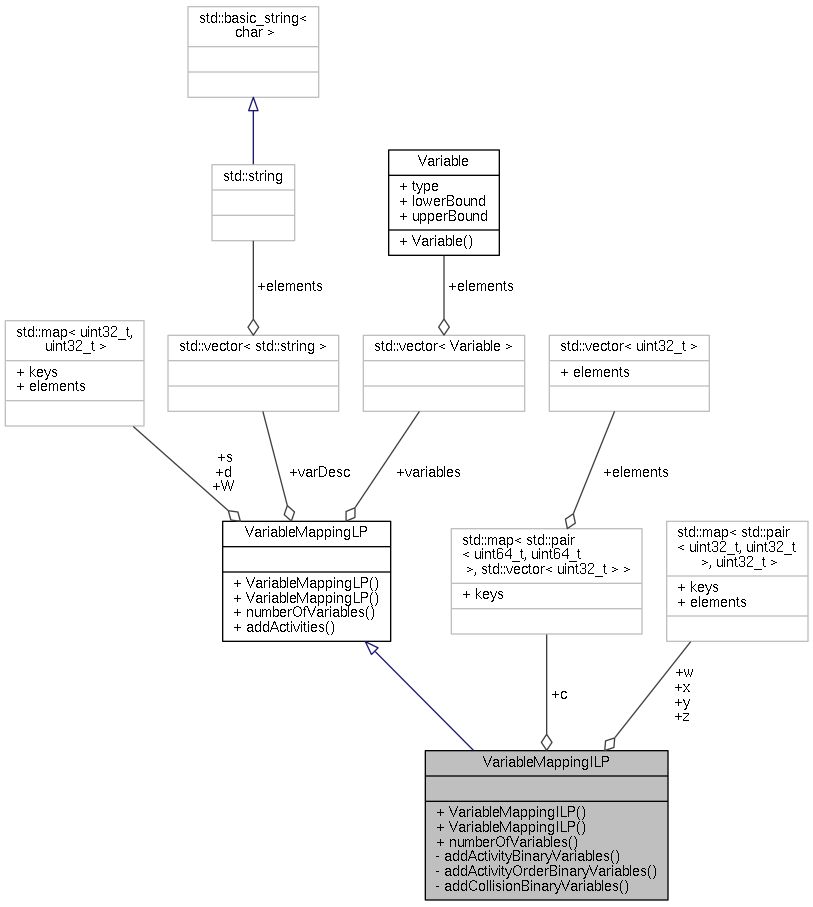
Public Member Functions | |
| VariableMappingILP (Robot *r) | |
| Constructs the mapping of all the variables related to robot r. | |
| VariableMappingILP (const RoboticLine &l) | |
| Constructs the mapping of all the variables related to robotic cell l. | |
| uint32_t | numberOfVariables () const |
| Total number of variables including both continuous and binary ones. | |
| Public Member Functions inherited from VariableMappingLP | |
| VariableMappingLP (Robot *r) | |
| Constructs the mapping of the continuous variables. More... | |
| VariableMappingLP (const RoboticLine &l) | |
| Constructs the mapping of the continuous variables. More... | |
| uint32_t | numberOfVariables () const |
| void | addActivities (const std::vector< Activity * > &activities, bool mandatory, bool mapW=true) |
| It adds the mapping for extra activities. More... | |
Public Attributes | |
| map2to1 | x |
| map2to1 | z |
| map2to1 | y |
| map2to1 | w |
| map4toN | c |
| Binary variables used for collisions resolution. | |
| Public Attributes inherited from VariableMappingLP | |
| map1to1 | W |
| Maps activity identification to the index of variable corresponding to the energy consumption of this activity. | |
| map1to1 | s |
| Maps activity identification to the index of variable corresponding to the start time of this activity. | |
| map1to1 | d |
| Maps activity identification to the index of variable corresponding to the duration of this activity. | |
| std::vector< Variable > | variables |
| Continuous variables of the problem with the well-specified domains. | |
| std::vector< std::string > | varDesc |
| Description of the continuous variables. | |
Private Member Functions | |
| void | addActivityBinaryVariables (Robot *r) |
| It creates the mapping for x, z, and y variables. | |
| void | addActivityOrderBinaryVariables (Robot *r) |
| It constructs the mapping for w variables. | |
| void | addCollisionBinaryVariables (const RoboticLine &l) |
| Mapping of c variables is created. | |
Detailed Description
Mapping of continuous and binary variables.
The mapping of both the continuous and binary variables is created by an object of this class.
- See also
- mathematical formulation
Definition at line 41 of file VariableMappingILP.h.
Member Data Documentation
| map2to1 VariableMappingILP::w |
Maps the identifications of the dynamic activity and its successor to the index of the binary variable that indicates whether this optional dynamic activity is performed or not.
Definition at line 70 of file VariableMappingILP.h.
| map2to1 VariableMappingILP::x |
Maps static activity identification and coordinate/location to the index of the binary variable that indicates whether the coordinate/location is selected for this activity or not.
Definition at line 55 of file VariableMappingILP.h.
| map2to1 VariableMappingILP::y |
Maps the identifications of the dynamic activity and movement to the index of the binary variable that indicates whether the movement is selected for this activity or not.
Definition at line 65 of file VariableMappingILP.h.
| map2to1 VariableMappingILP::z |
Maps the identifications of the static activity and power saving mode to the index of the binary variable that indicates whether the power saving mode is selected for this activity or not.
Definition at line 60 of file VariableMappingILP.h.
The documentation for this struct was generated from the following files:
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/inc/ILPSolver/VariableMappingILP.h
- /home/bukatlib/Downloads/SolverEquationsGeneratedAsImages/src/ILPSolver/VariableMappingILP.cpp
