Various data structures used by the heuristic. More...
#include <vector>#include <unordered_map>#include "RoboticLine.h"#include "Shared/Utils.h"#include "Shared/Exceptions.h" Include dependency graph for DataStructures.h:
Include dependency graph for DataStructures.h: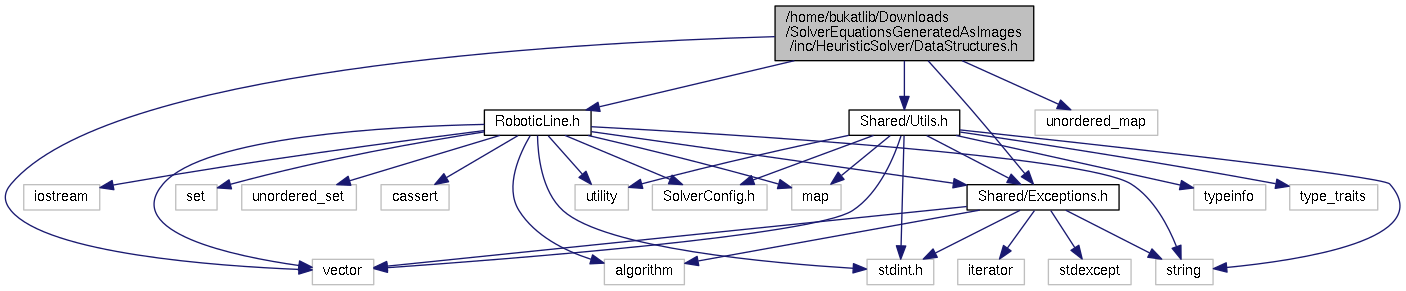 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: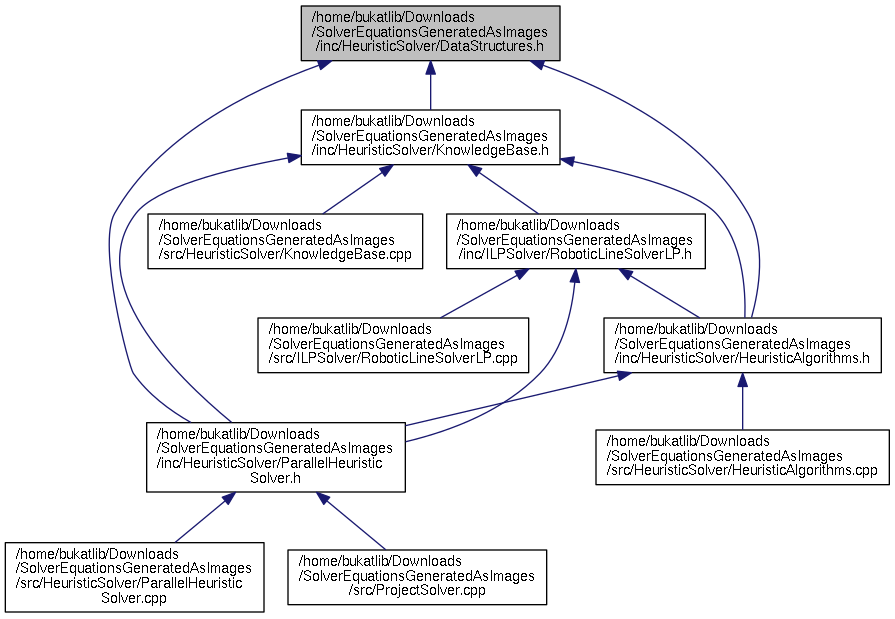
Go to the source code of this file.
Classes | |
| struct | Edge |
| A graph edge in the distance graph. More... | |
| struct | Graph |
| A graph in which random alternatives will be searched for. More... | |
| struct | HamiltonianCircuit< T > |
| Closed path through locations or static activities including an order of operations, i.e. alternative. More... | |
| struct | ShortestCircuit |
| Hamiltonian circuit through static activities and the fixed locations. More... | |
| struct | CircuitRecord |
| Shortest closed path through locations. More... | |
| struct | CircuitTuple |
| A partially fixed problem, i.e. tuple. More... | |
| struct | OptimalTiming |
| Obtained timing for a partial problem. More... | |
| struct | CollisionResolution |
| The structure stores how to resolve one collision between robots. More... | |
| struct | ModeSwitchInfo |
| Records a potential energy impact if a power saving mode of a robot is switched to another one. More... | |
| struct | ActivityModeInfo |
| Structure encapsulates the time and energy properties of an activity with its selected mode (a movement or location). More... | |
| class | TabuList |
| A short-term memory, containing a list of forbidden moves, that mitigates the risk of cycling. More... | |
| struct | TabuList::Element |
| An element of the tabu list. More... | |
| class | MovingAverage< T > |
| The class encapsulating the calculation of the moving average. More... | |
| struct | std::hash< ShortestCircuit > |
| Template specialization of the hash for the ShortestCircuit data-structure. More... | |
Typedefs | |
| using | PrecalculatedCircuits = std::unordered_map< ShortestCircuit, HamiltonianCircuit< Location >> |
| Mapping of ShortestCircuit to the related shortest closed path through locations. | |
Enumerations | |
| enum | Algo { LP_INITIAL_PROBLEM = 0, POWER_MODE_HEURISTIC = 1, LOCATION_CHANGE_HEURISTIC = 2, PATH_CHANGE = 4 } |
| Defining constants for different states of the heuristic. | |
Detailed Description
Various data structures used by the heuristic.
Definition in file DataStructures.h.
