The file contains various classes devoted to abstract representation of the robotic cell. More...
#include <cassert>#include <algorithm>#include <iostream>#include <stdint.h>#include <map>#include <set>#include <string>#include <vector>#include <unordered_set>#include <utility>#include "SolverConfig.h"#include "Shared/Exceptions.h" Include dependency graph for RoboticLine.h:
Include dependency graph for RoboticLine.h: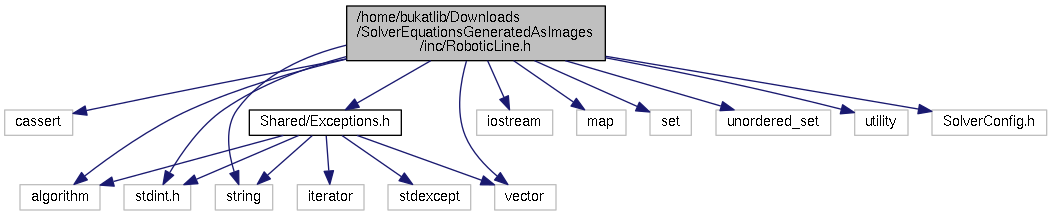 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: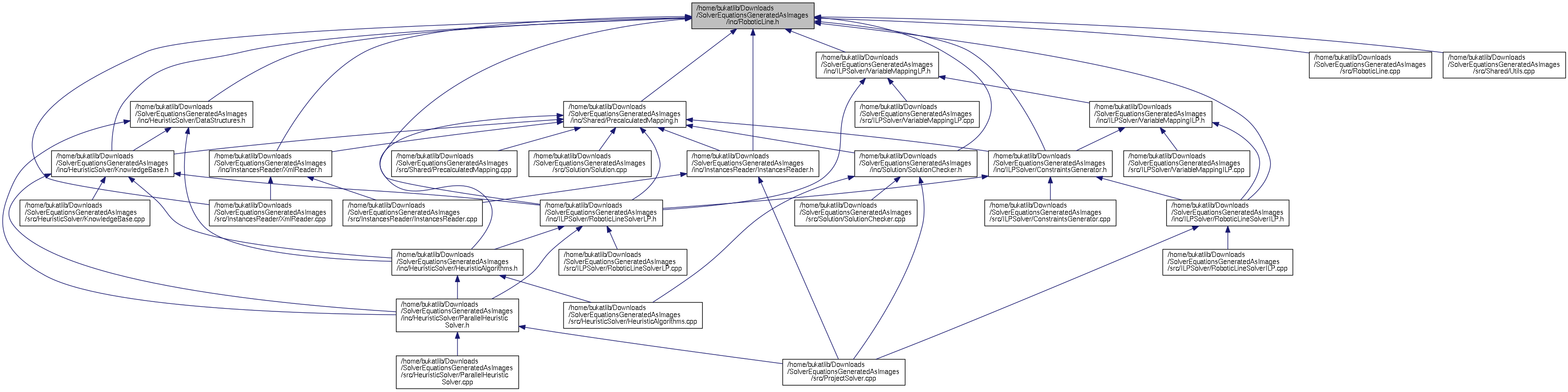
Go to the source code of this file.
Classes | |
| class | ActivityMode |
| Either a movement or location. More... | |
| class | Activity |
| The base class incorporating common properties of robot operations and movements. More... | |
| struct | Monomial |
| A part of the energy function of a movement. More... | |
| class | Movement |
| The instance of the class corresponds to a robot movement between two coordinates. More... | |
| class | Location |
| Location of the robot used either during work (welding) or waiting. More... | |
| class | DynamicActivity |
| Collection of movements between two static activities. More... | |
| class | StaticActivity |
| Collection of locations in which a robot operation (or waiting) can be performed. More... | |
| class | RobotPowerMode |
| It represents the power saving mode of the robot. More... | |
| class | LocationDependentPowerConsumption |
| The instance of this class specifies input power of the robot for a particular robot configuration and power saving mode. More... | |
| class | Robot |
| Instance of this class includes all the data structures and methods related to a robot. More... | |
| class | TimeLag |
| Instance of TimeLag class defines a time relation between two different robots. More... | |
| class | InterRobotOperation |
| The inter-robot operation corresponding to the workpiece/weldment handling. More... | |
| class | RoboticLine |
| The robotic cell corresponds to an instance of this class. More... | |
Detailed Description
The file contains various classes devoted to abstract representation of the robotic cell.
Definition in file RoboticLine.h.
